Predictive Uncertainty of Deep Learning based Models (Bayesian Deep Learning and Monte Carlo (MC) Dropout)
17 Dec 2022< 목차 >
Bayesian Modeling and Model Uncertainty
머신러닝에서 Bayesian Approach는 무엇을 의미할까요?
일반적인 머신러닝, 딥러닝에서는 우리가 추정하고자하는 출력 분포의 파라메터를 ‘점 추정(Point Estimation)’ 하게 됩니다. 점 추정이란 예를 들어 Maximum Likelihood Estimation (MLE) 를 통해 Likelihood 가 가장클 때의 값을 딱 하나만 사용해서 추론 결과를 내는, 즉 예를 들어 Gaussian Distribution Target 분포라면 (\(\mu=4.5\), \(sigma=2.7\)) 같은 식으로 deterministic 한 결과를 내는걸 의미합니다.
이는 prior를 고려해서 posterior를 구한 뒤 계산하는 Maximum A Posterior를 사용해서 파라메터를 찾아도 마찬가지 입니다.
하지만 이런 방식의 결과는 결과가 Over Confident 하다는 문제가 발생할 수 있는데요, 과연 이는 어떤 문제 일까요?
MLE and Bayesian Inference for Regression
아래는 Maximum lieklihood Approach를 통해 likelihood를 크게 만드는 파라메터 하나만을 점 추정한 선형회귀의 결과입니다.
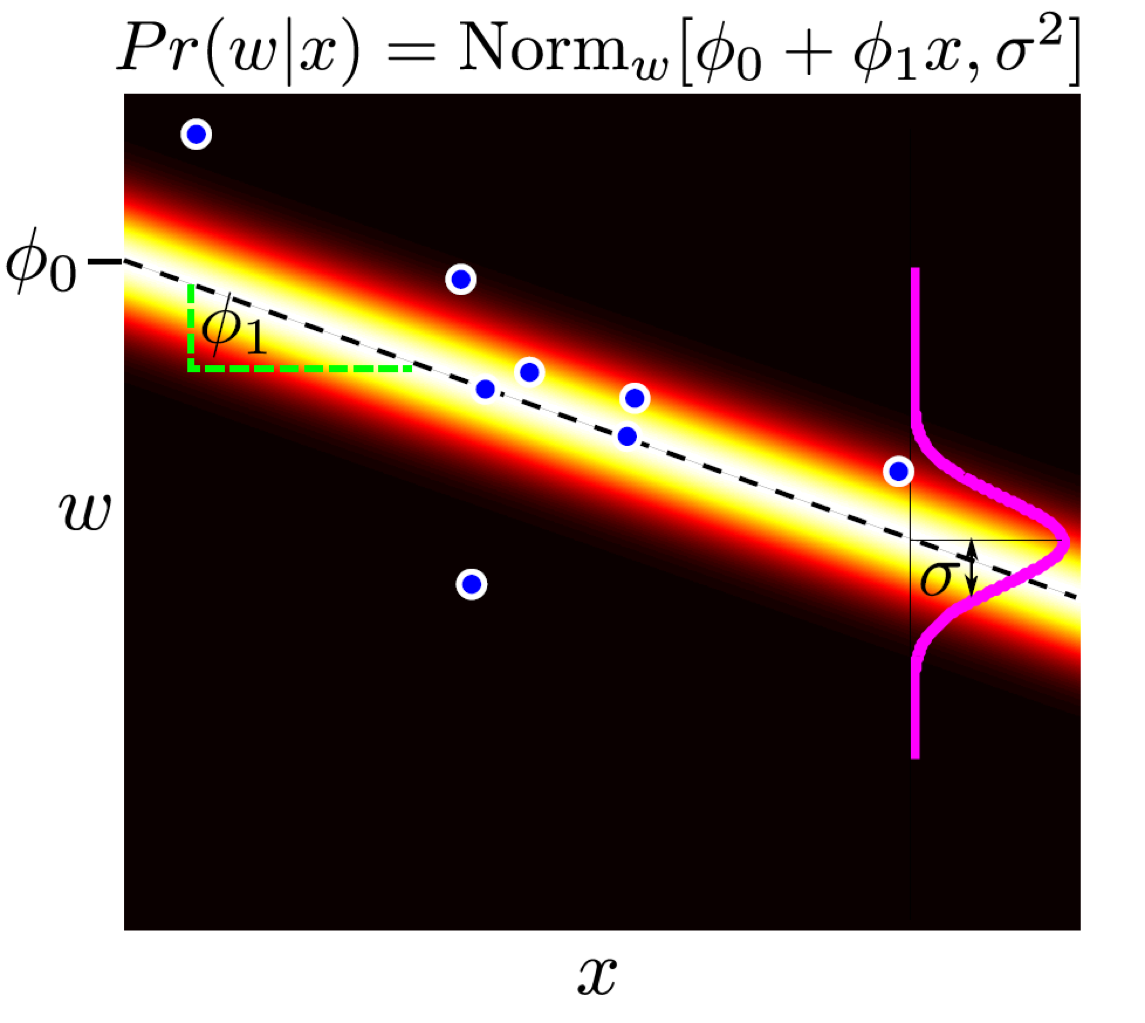 Fig.
Fig.
아래는 Bayesian Approach 통해 Inference한 방법입니다.
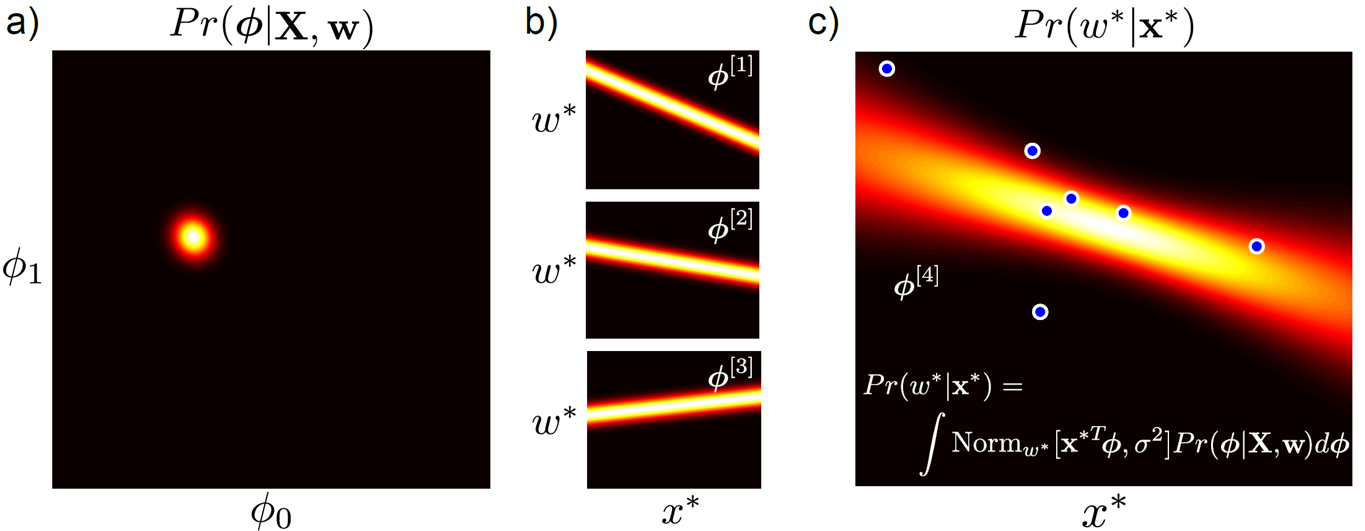 Fig.
Fig.
Bayesian Inference 란 그림에서도 알 수 있듯이, 예를들어 Target 분포가 Gaussian Distribution 이라면 Parameter Space 가 \(\mu, \sigma\) 에 대한 2차원 공간으로 주어질 것이고 이 속에서 표현 가능한 모든 값들을 사용해 (적분해) 회귀 곡선을 그리겠다는 겁니다.
둘의 차이는 회귀 곡선이 데이터 포인트가 별로 없는 부분에 대해서는 variance가 엄청 크게 나타난다는 겁니다. 즉 모델이 데이터가 없는 부분에 대해서는 잘 모른다고 대답하는것과 같죠.
MLE vs Bayesian Inference for Classification
분류 문제에서도 볼까요?
아래는 Binary Classification의 결과 예시 입니다.
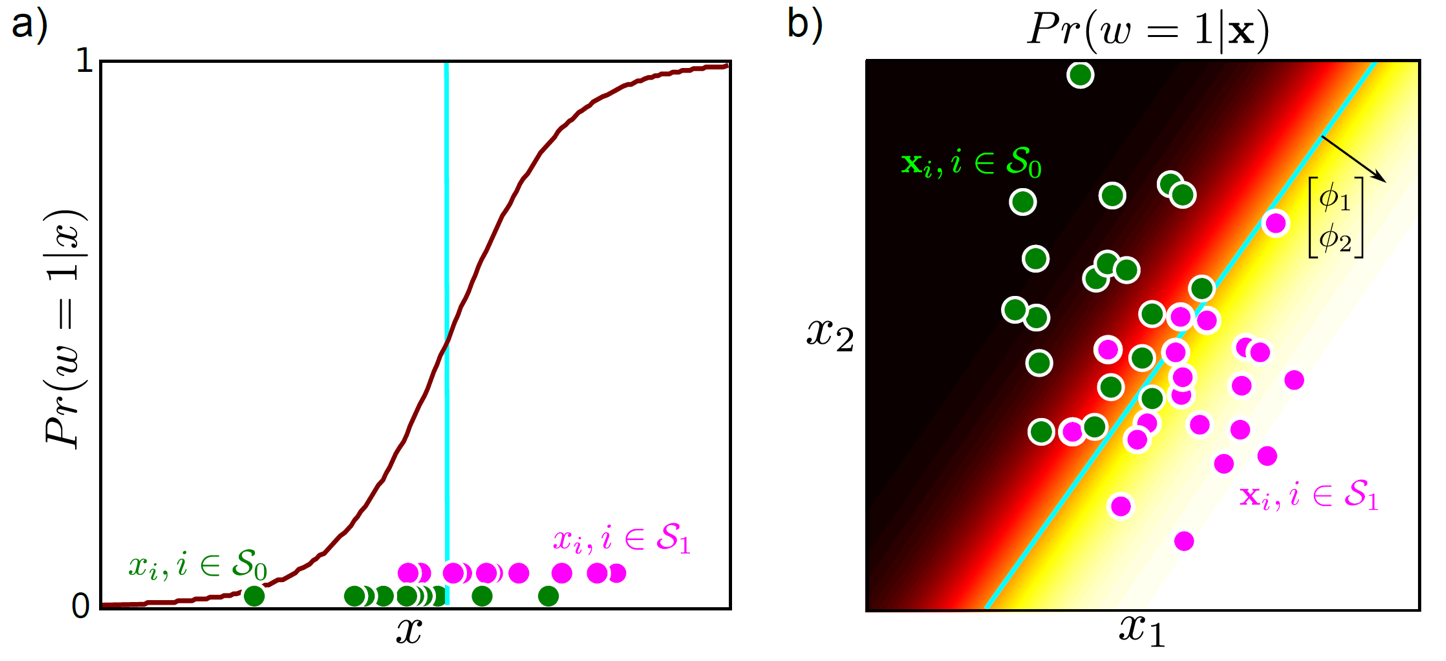 Fig.
Fig.
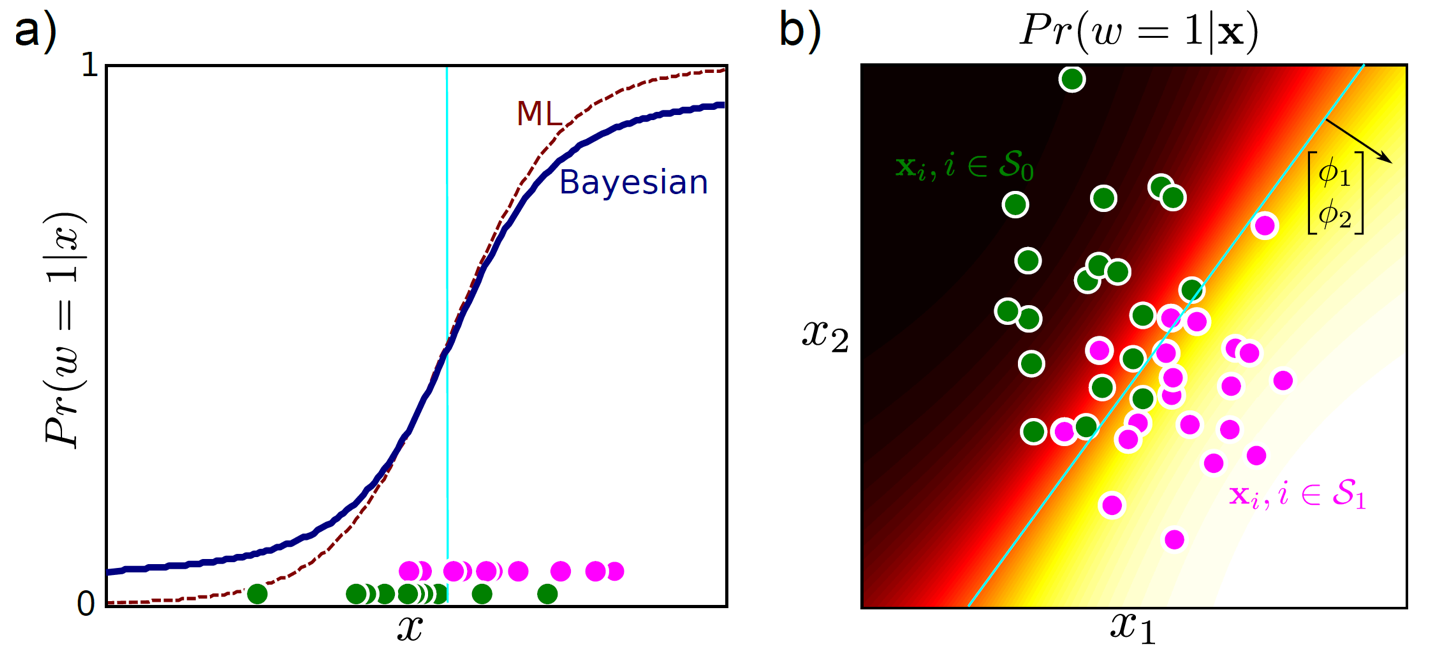 Fig.
Fig.
마찬가지로 MLE를 사용하면 Likelihood가 가장 클 때의 값만 취하는 점추정의 경우(위) Decision Boundary 가 데이터의 밀도와 상관없이 그어지는 걸 알 수있지만, Bayesian Inference 를 할 경우 데이터가 부족한 부분에 대해서는 Decision Boundary 가 옅어지는 (분산이 커지는) 걸 볼 수 있죠?
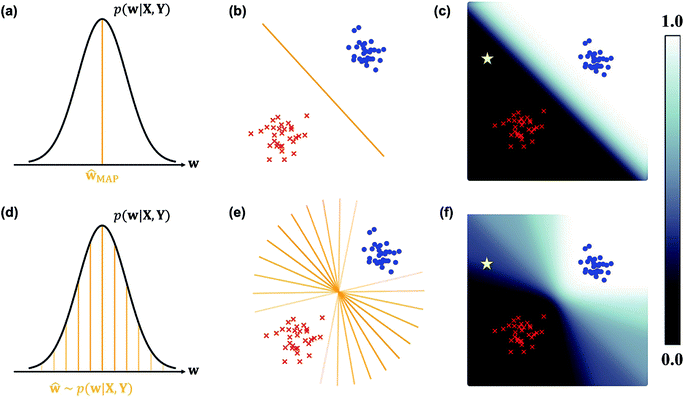 Fig. Source From link
Fig. Source From link
MLE는 학습이 끝난 뒤 위의 그림처럼 별 모양의 데이터가 들어가면 (학습때 보지 못한 데이터, 즉 Out-of-Distribution (OOD) ?), 모델이 자신있게 ‘class1’이라고 분류하는 모습을 볼 수 있는데요, 이는 좋지 어떤 경우에는 굉장히 치명적일 수 있습니다.
가령 뇌 종양이나 녹내장 같은 병을 진단하는 Binary Classification Task 에서 모르면 모른다고 하는 편이 낫지 (분산이 크게 나옴) 이걸 데이터가 많은 부분과 같은 자신감 (Confidence) 로 아닌데요?하면 큰일이 날 수 있는거죠.
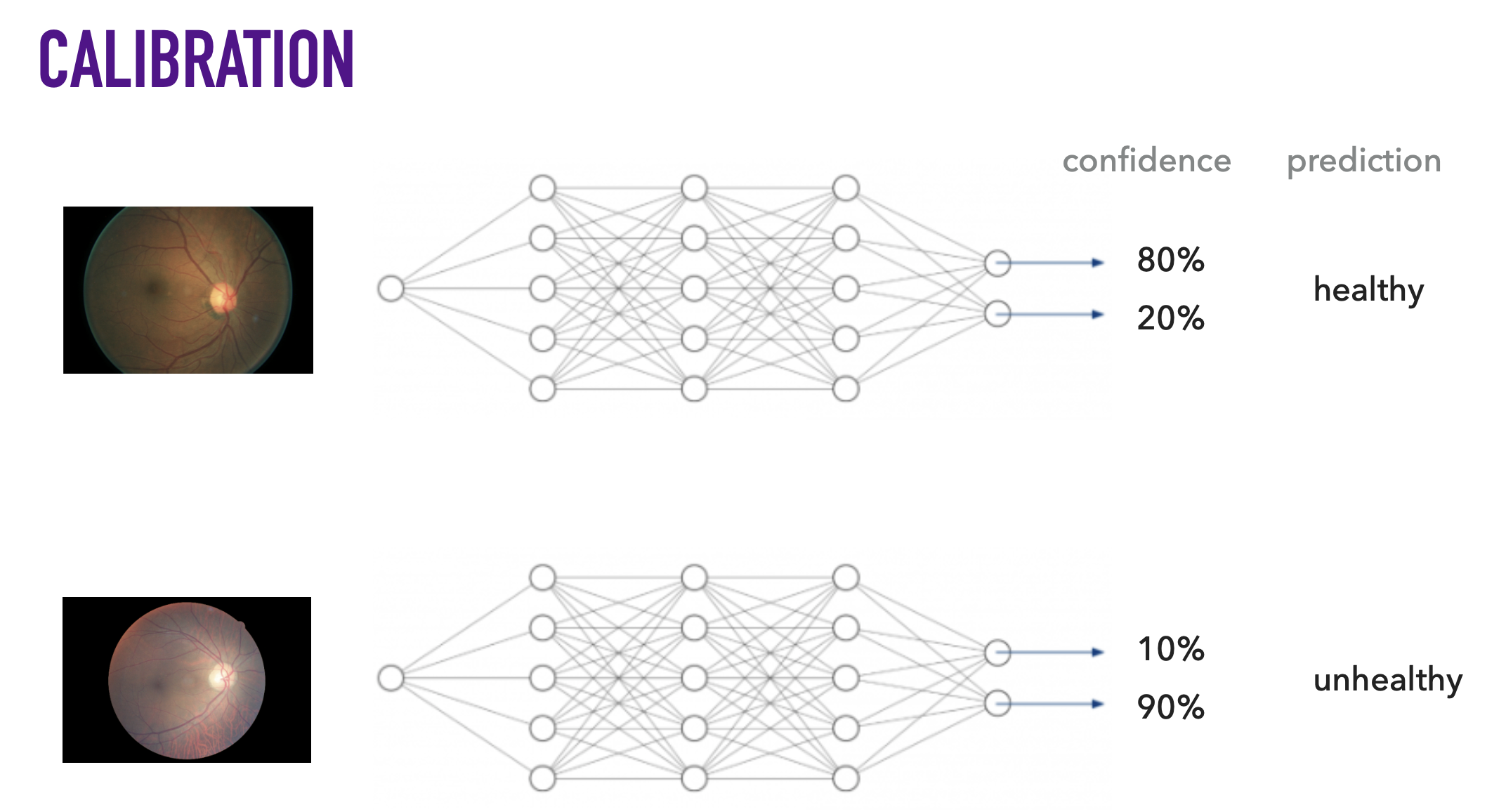 Fig.
Fig.
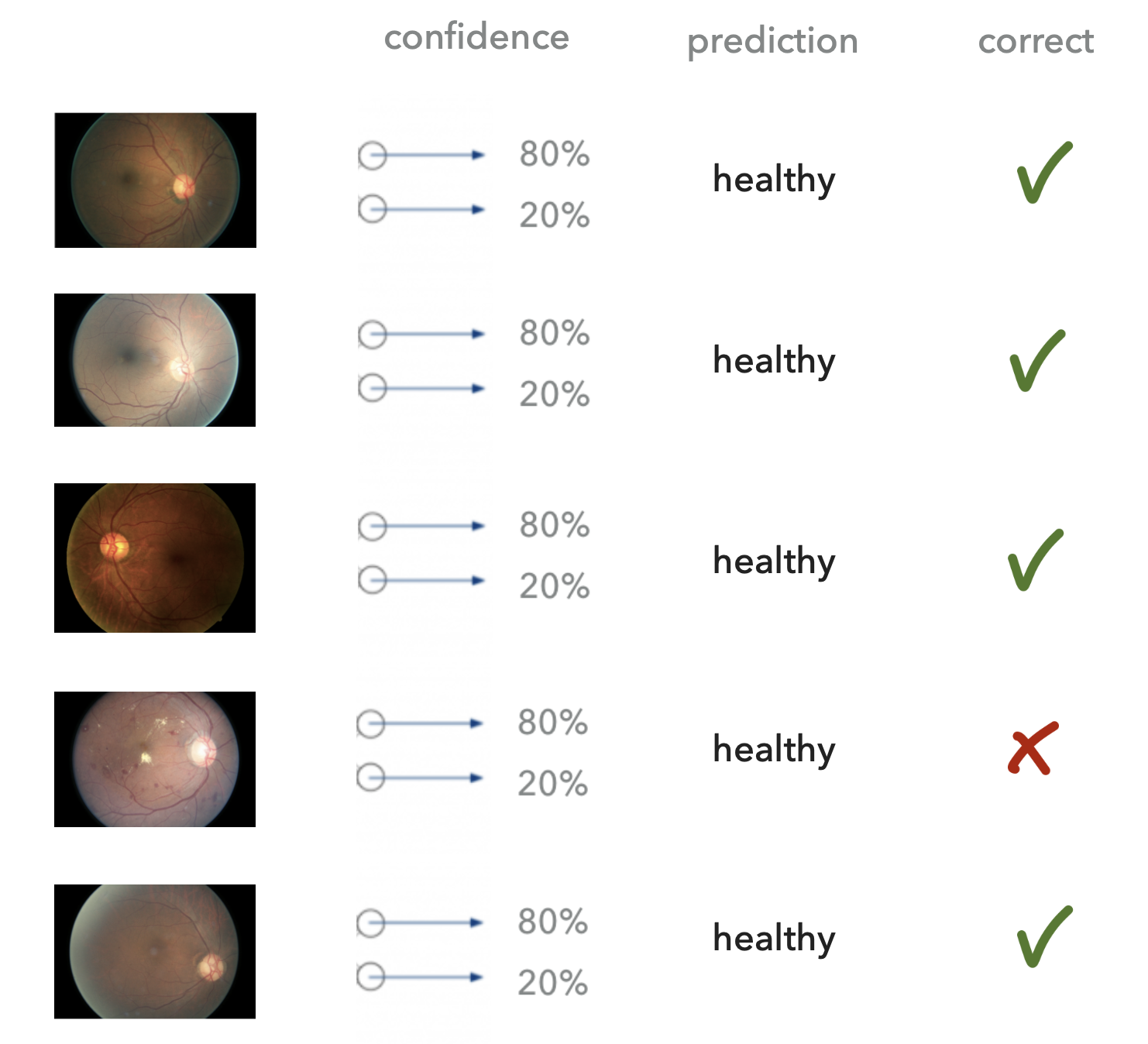 Fig.
Fig.
그런데 이런 Over Confidence 문제가 일반적인 머신러닝 Approach 에서도 문제인데, 현재 많이 쓰이는 Neural Network 에서는 더욱 두드러진다고 합니다.
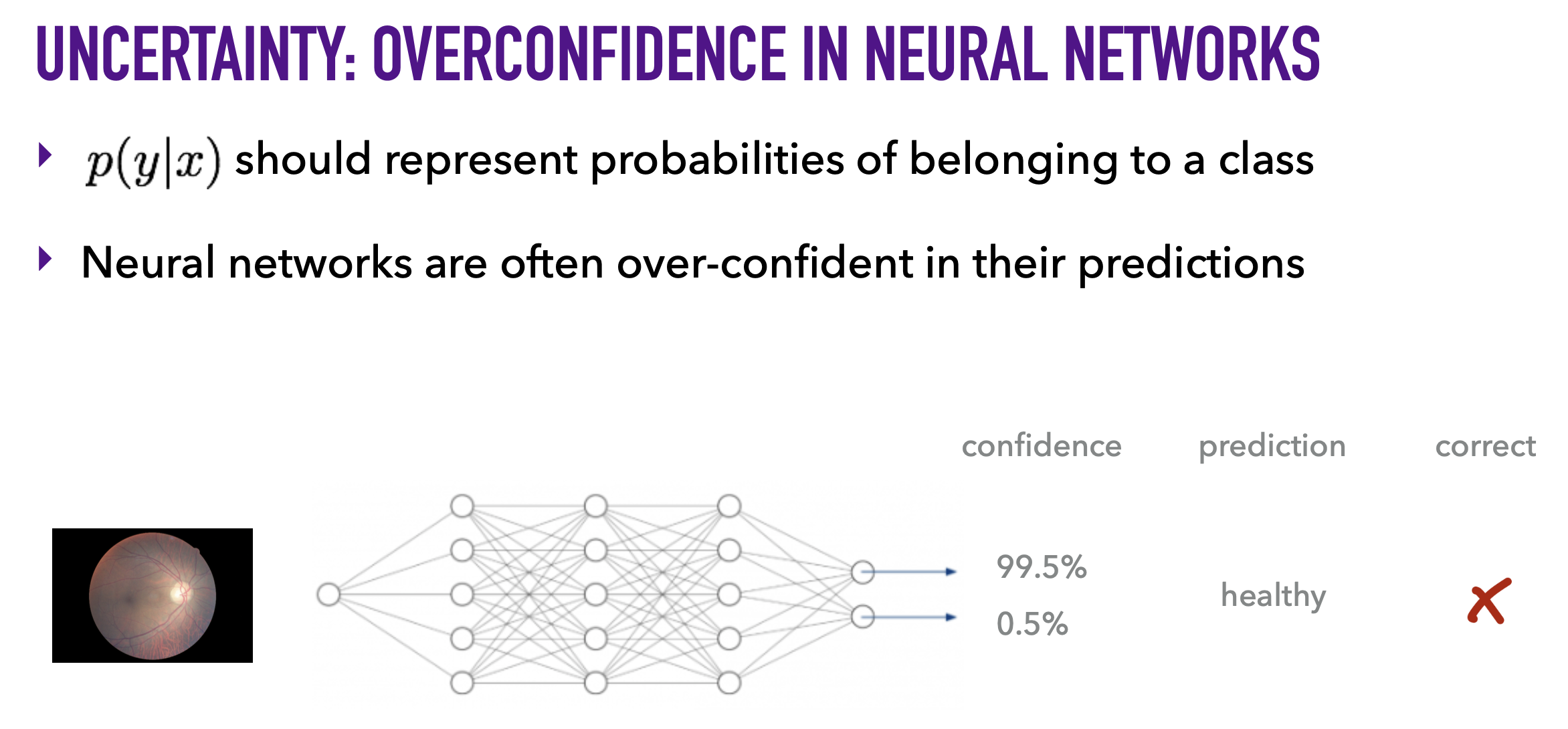 Fig.
Fig.
What is the Problem of Bayesian Approach?
우리는 앞서 모델이 어떤 부분을 모르는지를 나타내는, 즉 모델의 불확실성 (Model Uncertainty)을 나타내는 건 꽤 중요한 일임을 알게되었습니다.
그러면 Bayesian Approach 로 추론하는게 항상 제일 좋아보이는데 이 방법을 항상 쓰면 되지 않을까요?
사실 Bayesian Inference 를 한느것이 그렇게 값싼 연산은 아닙니다.
우리가 가장 흔하게 쓰는 MLE는 Target 분포를 Gaussian 쯤으로 정했을 때 Likelihood를 가장 높게 나타내는 \(\mu, \sigma\) 한 점만 고르면 된다고 했죠?
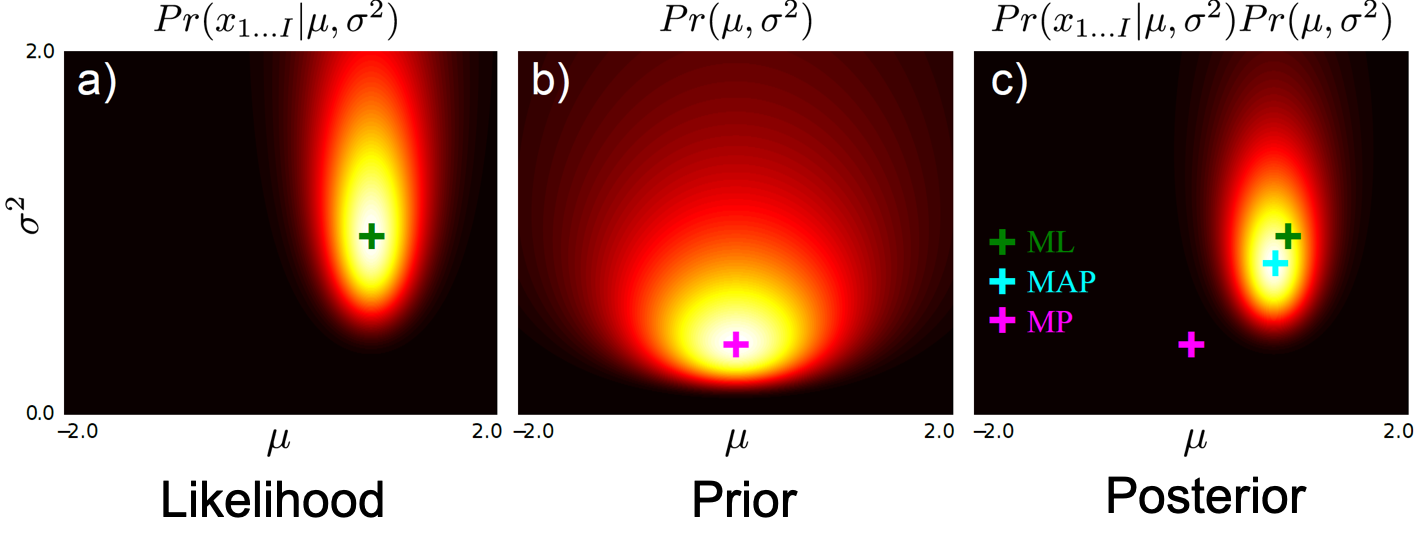 Fig.
Fig.
여기서 \(\mu, \sigma\) 이 각각 음 대충 0 mean, unit variance 일 확률이 가장 높겠지? 라는 Prior가 들어가면 이 둘을 이용해 Posterior 를 구할수 있습니다.
여기서 이 Likelihood 와 Prior 가 서로 Conjugate 관계이면 (Inverse Gaussian 이거나 Gaussian) Posterior 는 구하기 쉬울테고, Posterior 에서도 마찬가지로 이 값을 가장 크게해주는 점 하나만 추정한다면 그렇게 어렵지 않을겁니다.
(위의 그림을 보시면 MLE 와 MAP Solution 이 다르다는걸 알 수 있죠?)
여기서 Bayesian Inference 까지 하려면 이 Posterior 상의 모든 \(\mu, \sigma\) 와 각 점들의 확률값들을 사용해 이를 적분해야 하는데요,
\[\int_{\theta} p(x^{\ast} \vert \theta) p(\theta \vert X) d\theta = p(x^{\ast} \vert X)\]즉 Posterior 를 학습한 다음에, 적분까지 취해야 한다는 겁니다.
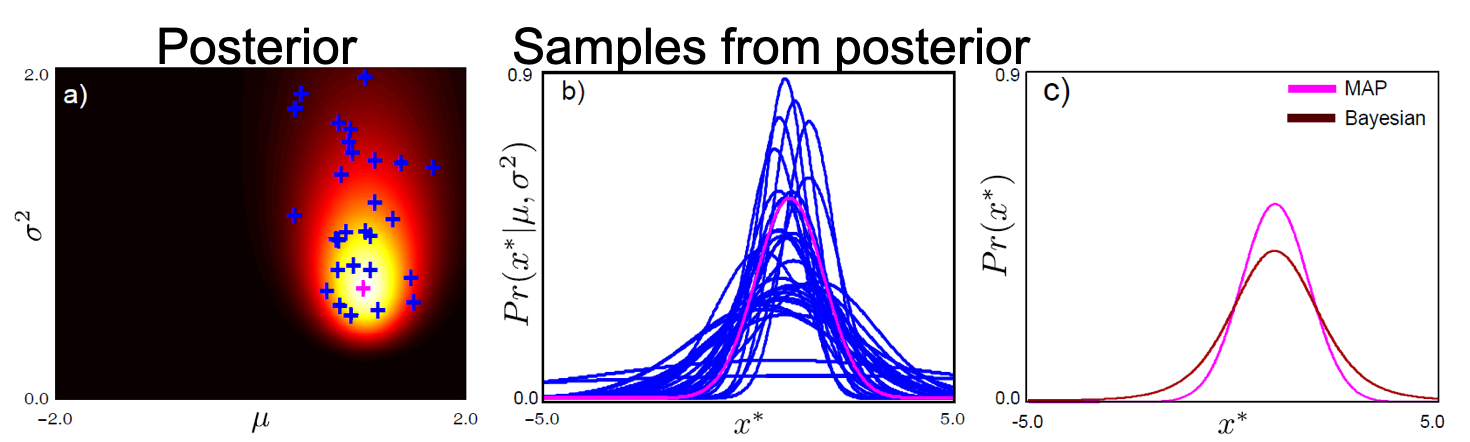 Fig.
Fig.
하지만 이런 적분 연산은 간단한 머신러닝 보다 더 흥미로운 모델, 즉 현대 딥러닝에 쓰이는 모델들에서는 수행하기 어려운 연산이고,
일반적인 머신러닝의 경우에도 비싼 연산인데 Model Weight (Parameter) \(\theta\) 가 많게는 억단위가 넘어가는 요즘 모델들에 대해서는 거의 불가능한 수준의 연산이 되게 됩니다.
(이를 Intractable 하다고 합니다.)
그래서 Bayesian Inference 를 할 때에는 Laplace Inference 나 Variational Inference 등 Posterior를 간단한 분포로 근사 (Approximation) 하는 방법을 사용하는 등 조치가 필요합니다.
Bayesian Linear Regression Example and Perspective of The Number of Data Points
우리가 앞서 Bayesian Inference 의 중요성에 대해서 얘기했지만 이게 항상 유효한가?, 비싼데 꼭 항상 할 필요가 있는가? 에 대해서도 생각해봐야 하는데요, 결론부터 말하자면 데이터가 충분히 많으면 Bayeisan Inference 나 MLE, MAP 나 거의 같은 Solution 을 제공하기 때문에 데이터가 충분히 많으면 그럴필요 없다 라고 할 수 있겠습니다.
선형 회귀를 한다고 생각해봅시다.
weight 는 일단 1차원이고,
\[y = wx + \epsilon, \text{where } \epsilon \sim N(0, \sigma^2)\]이 때 Data Sample 은 3개밖에 없다고 생각합시다.
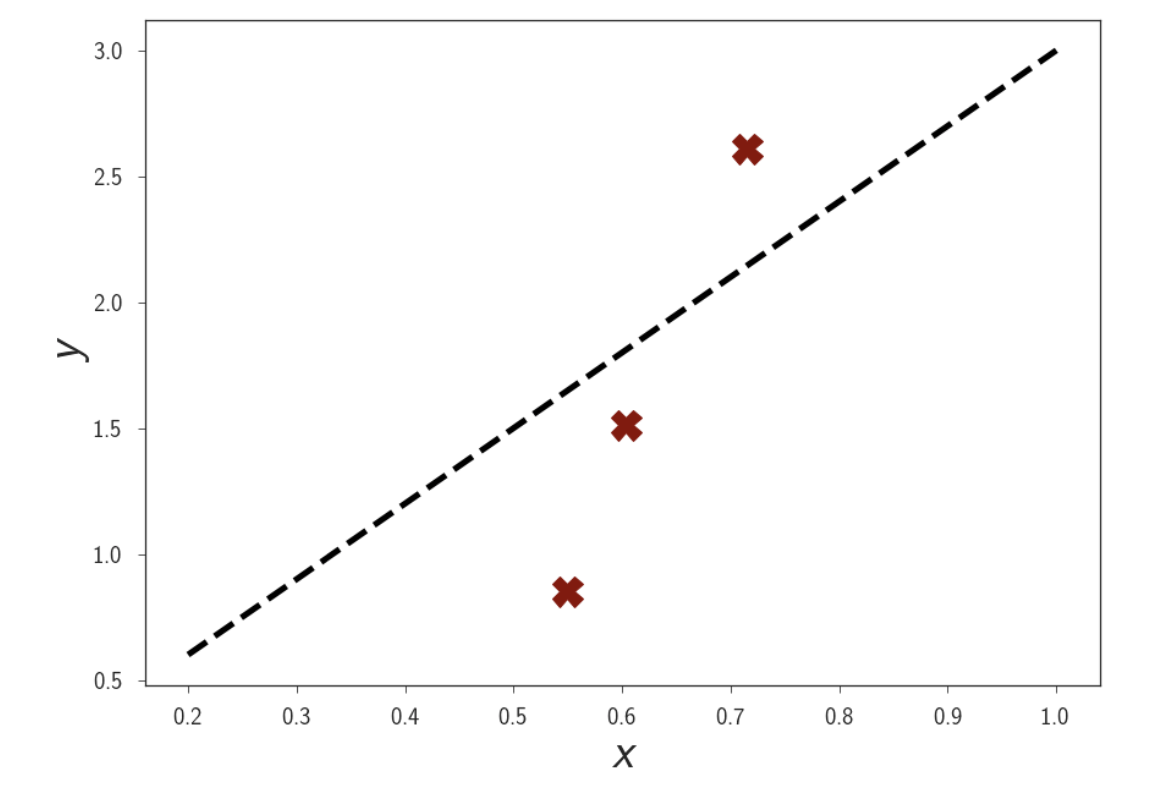 Fig.
Fig.
이 문제의 MLE Solution 은 다음과 같이 쉽게 구할 수 있겠죠?
\[\begin{aligned} & w_{MLE} = arg max_{w} log p(D \vert w) \\ & = arg max_{w} \sum_i log p(y_i \vert x_i, w) \\ \end{aligned}\] \[\max _w \sum_{i=1}^N \log \mathcal{N}\left(y_i \mid w x_i, \sigma^2\right) \Longleftrightarrow \min _w \frac{1}{N} \sum_{i=1}^N\left(y_i-w x_i\right)^2\]데이터가 적기 떄문에 실제 데이터가 샘플링 된 Optimal Solution 인 \(w_{ture}\) 에 도달하지는 못했네요.
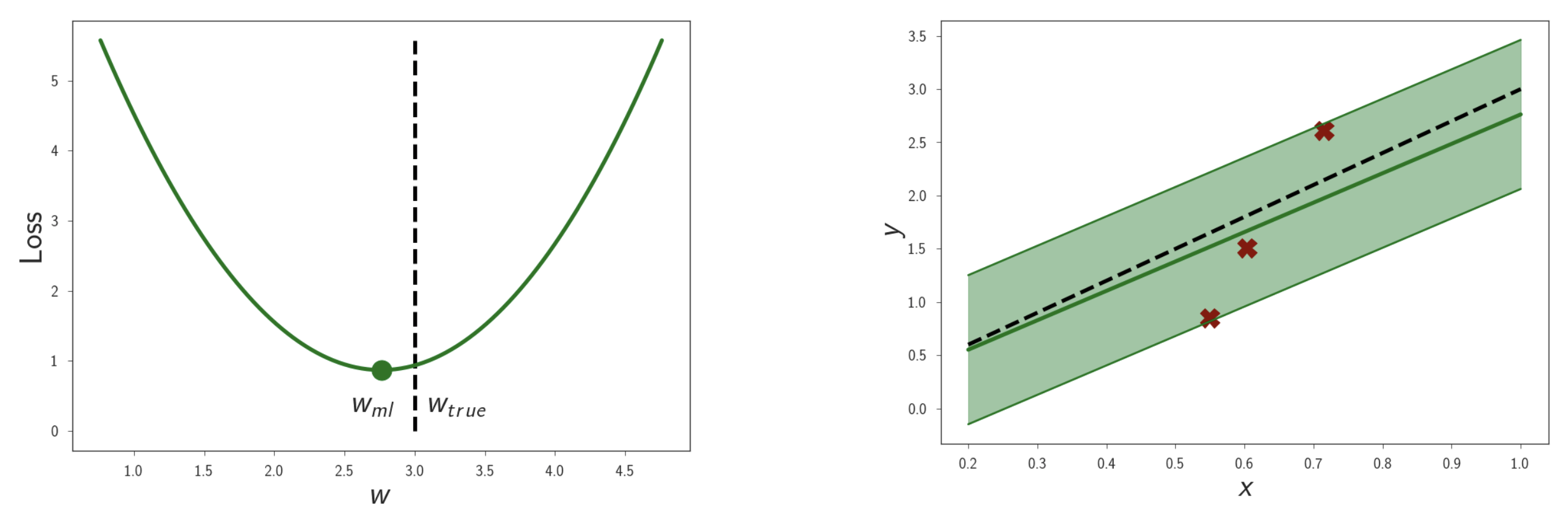 Fig.
Fig.
이제 MLE 로 구한 Solution 의 Uncertainty 는 얼마나 되는지 측정하기 위해 weight, \(w\) 의 prior distribution \(p(w)\) 를 도입합시다.
w 가 어떤 값이냐에 따라서 선이 다르게 그어지는 걸 알 수 있죠.
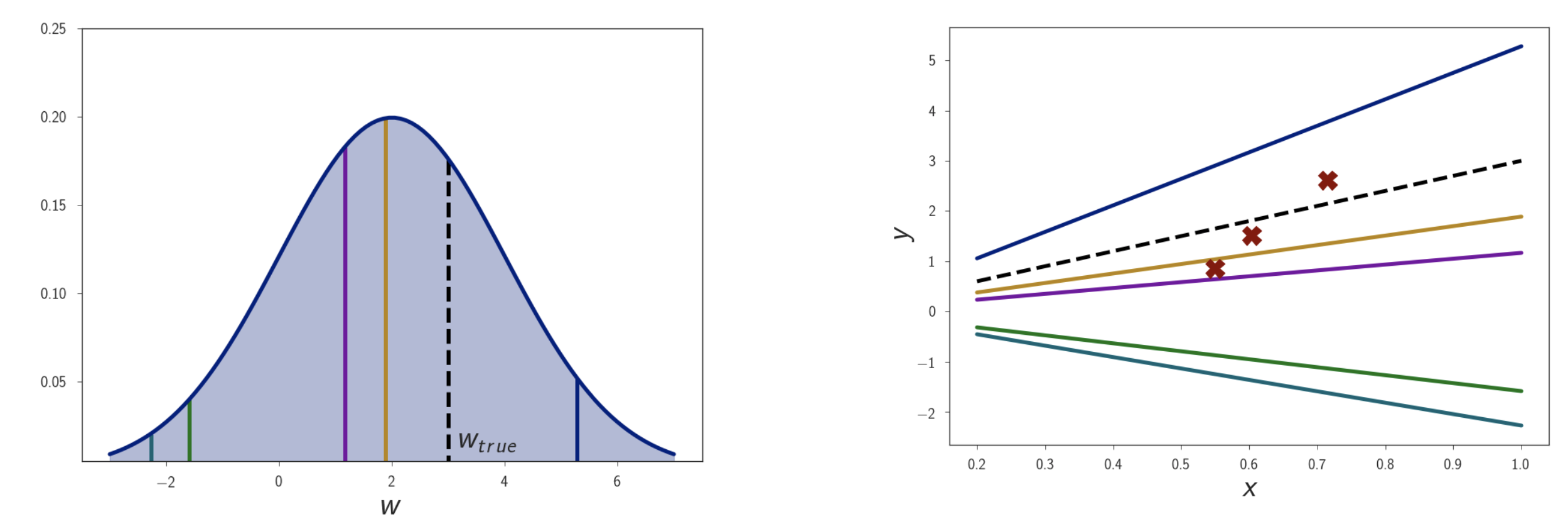 Fig.
Fig.
이제 Posterior 를 구하기 위해 Bayes Rule 에 따라 Likelihood와 Prior를 곱합시다.
\[\text{Posterior} \approx \text{Likelihood} \times \text{Prior}\] \[p(w \vert D) = \frac{p(D \vert w ) p(w)}{p(D)}\]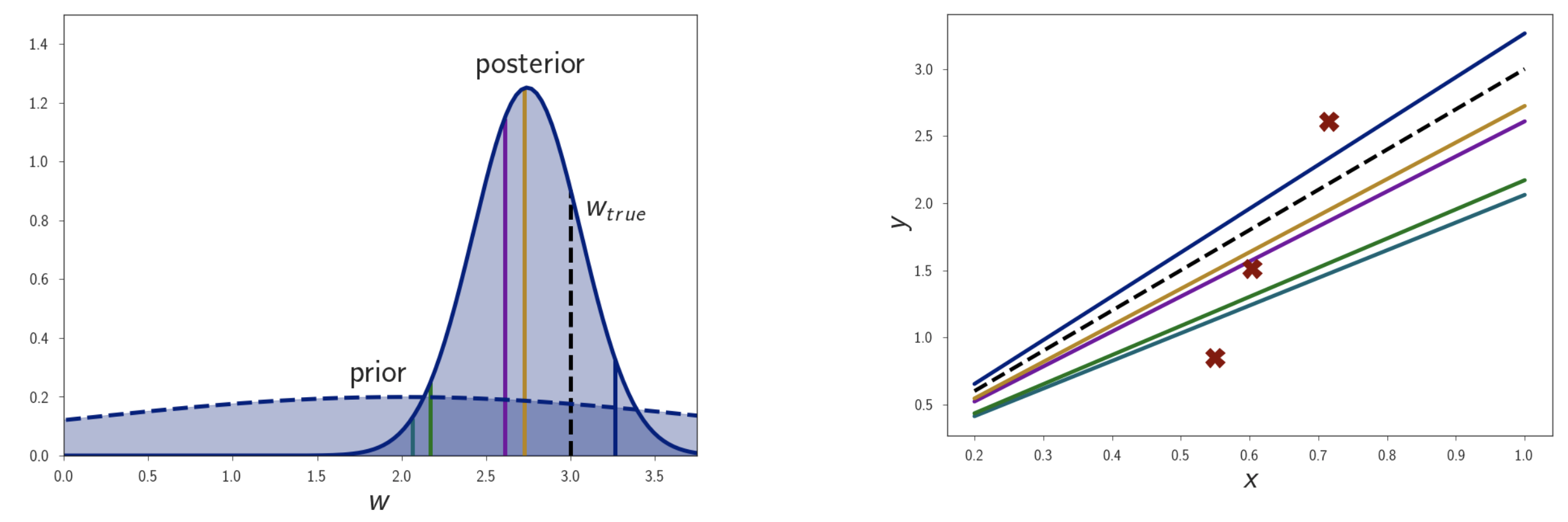 Fig.
Fig.
그러면 실제로 우리가 weight 는 2.0에 있을 확률이 제일 높겠지? 라고 생각하고 만들었던 Prior 분포에 dataset의 정보가 주입되면서 만들어진 Posterior 분포가 위와 같이 만들어지고 여기서 제일 높은 값을 취한 MAP Solution 인 황색선 또한 MLE 처럼 \(w_{ture}\) 와 거리가 있는 것을 알 수 있습니다.
(Prior 를 도입한 Solution, 즉 MAP 는 MLE + Regularization 임을 알 수 있다. P(w) 가 Gaussian 이면 \(L_2\) Norm, Laplace 이면 \(L_1\) Norm)
이제 이 Posterior 의 모든 weight 값들을 고려해서 적분해주면 Uncertainty 를 estimation 하는 결과를 낼 수 있는데요, 여기서 데이터를 늘려봅시다.
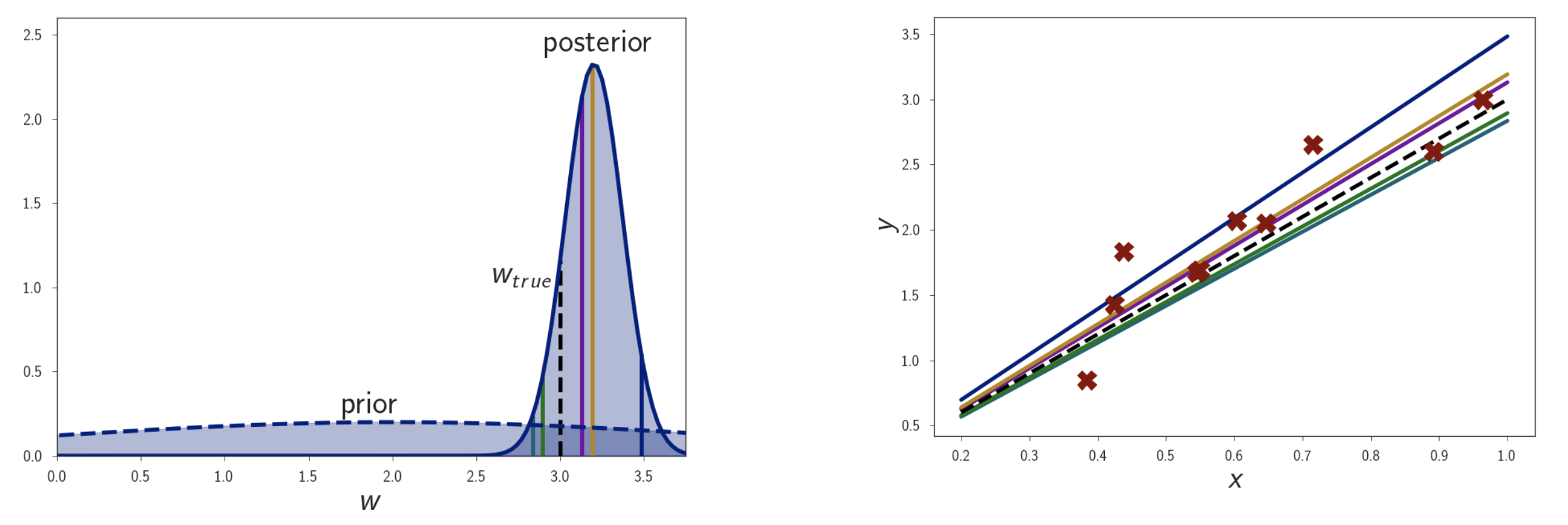 Fig.
Fig.
데이터를 늘릴수록 Likelihood 가 바뀌고, 그에 따라 Posterior 가 바뀌는 것을 볼 수 있죠.
더 늘려볼까요?
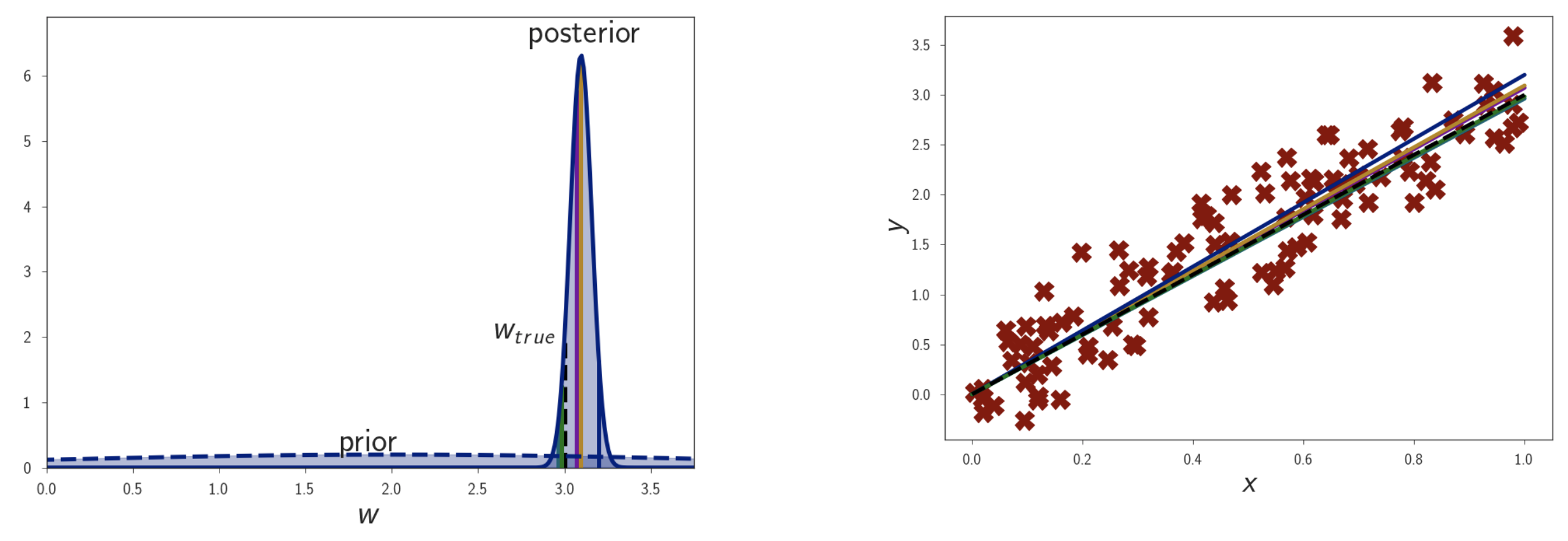 Fig.
Fig.
그렇습니다. 데이터가 많아질수록 Posterior 는 점점 Delta Function 에 가까운 모양을 하면서 결국에는
\[w_{\text{true}} \approx w_{\text{MAP}} \approx w_{\text{MLE}} \approx w_{\text{Bayesian Inference}}\]가 되는것을 알 수 있습니다.
하지만 데이터와 파라메터의 Space 가 커질수록 이런 현상은 거의 없다고 봐야될 것 같습니다 (…)
Approximation
Variational Inference
그러면 어떻게 해야 복잡한 딥러닝 모델의 Posterior 를 계산하고 적분할 수 있을까요?
Notation 부터 다시 써봅시다. 앞으로 제가 쓸 수식의 기본 뼈대로 Yarin Gal 의 박사 학위 논문 (Thesis) 를 사용하겠습니다.
- Label : \(Y\)
- Input : \(X\)
- Model Weight : \(w\)
- Likelihood : \(p(y \vert x, w)\)
Posterior: \(p(w \vert X,Y) = \frac{ p(Y \vert X,w) p(w) }{ p(Y \vert X) }\)- Likelihood 와 Prior 의 곱이라고 생각할 수 있음.
- Bayesian Inference : \(p( y^{\ast} \vert x^{\ast}, X,Y) = \int p(y^{\ast} \vert x^{\ast},w) p(w \vert X,Y) dw\)
- Posterior 를 사용해서 적분함
- Evidence (Normaliser) : \(p(Y \vert X) = \int p(Y \vert X,w) p(w) dw\)
- Posterior 수식의 분모
여기서 우리가 구하기 힘든건 \(p(w \vert X,Y)\) 라는 Posterior 입니다.
이 구하기 힘든걸 True Posterior 라고 하겠습니다 (실제로 분모의 적분까지 써서 복잡하게 계산해야 하지만 계산할 수 없는 것).
근데 이 분포가 굉장히 간단한 분포를 가정해보면 어떨까요? 이를 \(q(w \vert \theta)\) 혹은 \(q_{\theta}(w)\) 라고 정의합시다. 만약 이 분포가 mode가 한개인 가우시안 분포라면 어떨까요? \(\theta = \mu, \sigma\)가 될 것이고 그렇다는 것은 mean, variance 값만 하나씩 구해주면 되겠죠?
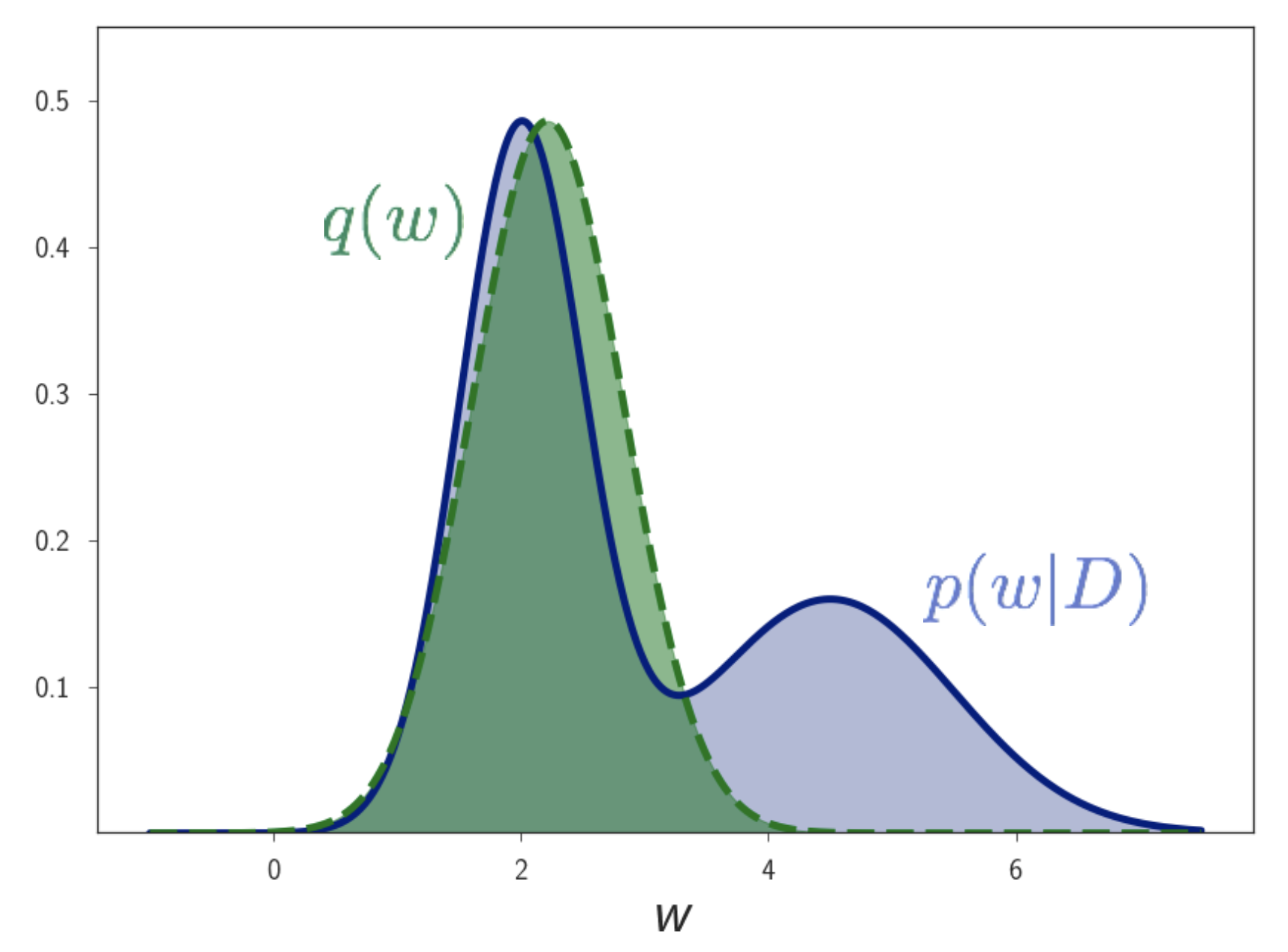 Fig.
Fig.
물론 이게 실제 분포가 아니지만, mean 값을 posterior의 최대인 지점과 비슷하게 설정하고 variance 를 조절해가다보면 꽤나 비슷한 모양을 얻을 수 있지 않을까요? 중요한건 우리가 하고 싶은게 Bayesian Inference 이기 때문에 이게 어떻게 생겼는지는 크게 관심이 없고 다만 데이터를 잘 반영하는 분포 이기만 하면 충분할 것 같습니다.
우리가 해야될 일은 이 두 분포가 최대한 유사해지는 \(\theta\) 를 구하는 건데요, 이를 위해 서로 다른 두 확률 분포가 서로 얼마나 유사한지를 잴 수 있는 Kullback–Leibler Divergence (KLD) 를 이용할 겁니다.
\[KL(q_{\theta} \parallel p(w \vert X,Y)) = \int q_{\theta}(w) log \frac{ q_{\theta}(w) }{ p(w \vert X,Y) }\]이 적분식은 \(q_{\theta}(w)\) 가 \(p(w \vert X,Y)\) 에 대해서 연속적일 때만 정의가 된다고 합니다.
KLD 값이 0에 가까울 수록 두 분포가 유사한 것이되는데요, 그렇게 되는 \(q_{\theta} (w)\) 를 구했으면 Bayesian Inference 를 어떻게 바꿀 수 있을까요? 바로 아래처럼 바꿀 수 있습니다.
posterior 를 구하기 쉬운 가우시안으로 만들었기 때문에 할만해진 것 같습니다.
이제 어떻게 모델을 학습하느냐? Objective 는 어떻게 생겼느냐? 에 의문이 생기실 것 같습니다
이는 Evidence Lower BOund (ELBO) 라는 것을 유도해낸 뒤에 이를 최적화 하면 되는데요,
이를 같이 유도해보죠.
Evidence Lower Bound (ELBO)
ELBO 를 유도해야 하는 이유는 KLD 를 직접적으로 최적화 할 수 없기 때문이라고 알려져 있는데요, 이를 유도하기 위해서는 몇 가지 수학적인 연산자를 알아야 합니다.
- Expectation <-> Integral : \(\mathbb{E}_q[p(x)] = \int_x q(x) p(x) dx\)
- KLD : \(KL(q \parallel p) = \int q log \frac{q}{p} = \mathbb{E}_q [ log \frac{ q }{ p } ]\)
- Entropy : \(H(p) = \int p log p = \mathbb{E}_p [log p]\)
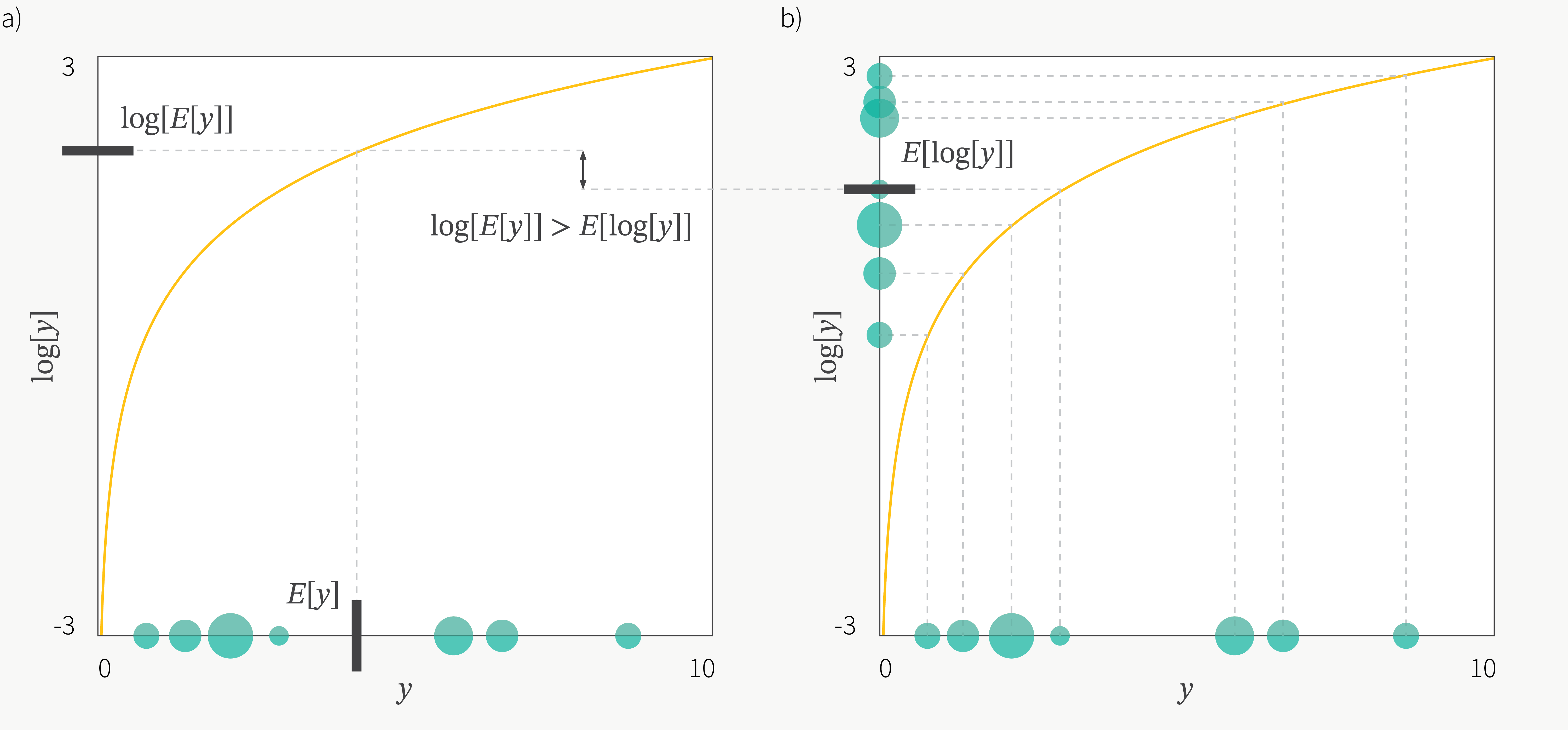
- Jensen’s Inequality : \(f (\mathbb{E} [X]) \geq \mathbb{E} [ f(X) ]\)
자 이제 첫 번째로 \(p(y \vert x)\) 라는 Evidence 에 대해 생각해 봅시다.
+) ELBO는 Variational Auto Encoder (VAE) 에서도 같은 방법으로 유도하는데요,
VAE에서는 \(log p_{ \color{red}{\theta}}(x)\) 라고 하는 Log Likelihood 에 잠재변수 z 를 끼워서 Objective 를 유도하기도 합니다.
즉 이 때는 Evidence 에서 출발하지 않는데요,
지금의 경우는 model 이 주어지지 않았을 때, Evidence 에서 시작하는 것이고, VAE의 경우는 그 model이 deterministic 하게 주어졌다고 생각하고 시작하기 때문에, 거의 같은 수식을 전개하지만 시작할 때 다른 용어를 쓰는 것 같습니다.
지금의 경우는 Evidence 를 쓰는데요, Model Evidence 는 다른 말로 Marginal Likelihood 라고도 합니다.
이는 Model이 주어진 (parameter space 상의 한 점으로) 경우를 모든 parameter space 에 대해 적분 하는, 주변화 (Marginalization) 을 한게 Evidence 니까 모든 경우에서의 Likelihood 를 고려한 상위 ? 개념 이라고 할 수 있겠네요.
우변의 결합 분포는 w 에 대해 적분을 하면 \(p(y \vert x)\) 가 되기 때문에 아무 문제가 없고, 이제 여기에 \(\frac{q_{\theta}(w)}{q_{\theta}(w)}\) 라는 항을 곱해봅시다.
\[log p(y \vert x) = log \int_w p(y \vert x, w) p(w) \frac{q_{\theta}(w)}{q_{\theta}(w)} dw\]여기서 \(\frac{q_{\theta}(w)}{q_{\theta}(w)}\) 는 1이기때문에 1을 곱하는건 아무 문제가 안됩니다.
위 수식은 적분 연산자를 기대값으로 바꿀 수 있으니 아래와 같이 식을 수정할 수 있습니다.
\[\begin{aligned} & log p(y \vert x) = log \int_w p(y \vert x, w) p(w) \frac{q_{\theta}(w)}{q_{\theta}(w)} dz \\ & = log ( \mathbb{E}_q [ \frac{p(y \vert x, w) p(w)}{q_{\theta}(w)} ] ) \\ \end{aligned}\]여기에 Jensen’s Inequality 를 사용하면
가 됩니다.
여기서 우변의 분수는 log가 취해져 있기 분해를 할 수 있는데요, 이를 적당히 분해하면
\[\begin{aligned} & log ( \mathbb{E}_q [ \frac{p(y \vert x, w) p(w)}{q_{\theta}(w)} ] ) \geq \mathbb{E}_q [ log p(y \vert x, w)] + \mathbb{E}_q [ log \frac{ p(w) }{q_{ \theta}(w)} ] \\ & \geq \int q_{\theta}(w) p (y \vert x, w) dw - KL (q_{\theta} (w) \parallel p(w) ) \\ \end{aligned}\]최종적으로
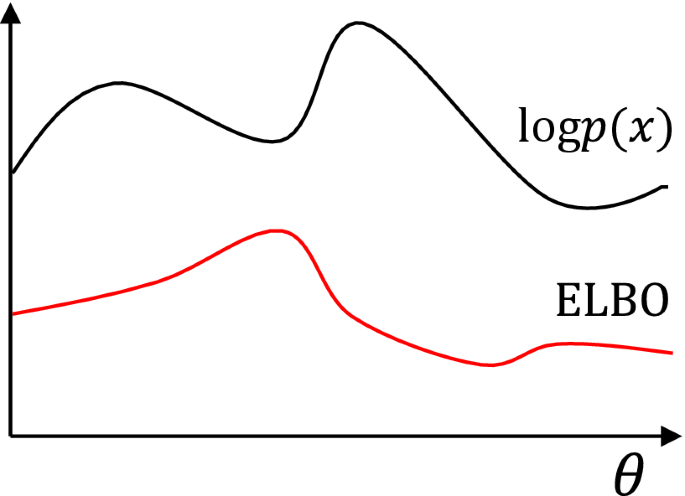
\[\text{Log Evidence} = log p(y \vert x) \geq \int q_{\theta}(w) p (y \vert x, w) dw - KL (q_{\theta} (w) \parallel p(w) )\]라는 수식을 얻는데요, 여기서 좌변을 Log Evidence, \(log p(y \vert x)\) 라고 부르고 우변은 이 보다 작은 하계 (Lower Bound) 이기 때문에 이를 Evidence Lower BOund (ELBO) 라고 부릅니다.
How tight is the Bound?
추가적으로 그러면 Log Evidence 와 Bound 는 얼마만큼의 차이가 있는지 알아보겠습니다.
아까 우리가 정의한 근사 posterior 와 실제 posterior 와의 KLD 수식이 있었습니다.
\[KL(q_{\theta} (w) \parallel p(w \vert X,Y)) = \int q_{\theta}(w) log \frac{ q_{\theta}(w) }{ p(w \vert X,Y) }\]KLD도 기대값으로 바꾸면
\[\begin{aligned} & KL(q_{\theta} (w) \parallel p(w \vert X,Y)) = \int q_{\theta}(w) log \frac{ q_{\theta}(w) }{ p(w \vert X,Y) } \\ & = \mathbb{E}_q [log \frac{q_{\theta}(w)}{p(w \vert X,Y)}] \\ \end{aligned}\]가 됩니다.
여기서 Posterior 는 Bayes Rule 을 통해 Likelihood, Prior, Evidence 세 가지를 가지고 구한 값이었죠?
\[p(w \vert X,Y) = \frac{ p(Y \vert X,w) p(w) }{ p(Y \vert X) }\]이를 사용하면
\[\begin{aligned} & KL(q_{\theta} (w) \parallel p(w \vert X,Y)) = \mathbb{E}_q [log \frac{q_{\theta}(w)}{p(w \vert X,Y)}] \\ & = \mathbb{E}_q [log \frac{q_{\theta}(w) p(Y \vert X)}{p(Y \vert X,w) p(w)}] \\ & = \mathbb{E}_q [ log p(Y \vert X) ] - \mathbb{E}_q [ log (\frac{p(Y \vert X, w) p(w)}{q_{\theta}(w)}) ] \\ \end{aligned}\]가 됩니다.
아까 우리가 구한 ELBO 는 아래와 같았죠?
\[\begin{aligned} & \text{Log Evidence} = log p(Y \vert X) \\ & \geq \text{Lower Bound} = \mathbb{E}_q [ log (\frac{p(Y \vert X, w) p(w)}{q_{\theta}(w)}) ] \\ & = \int q_{\theta}(w) p (y \vert x, w) dw - KL (q_{\theta} (w) \parallel p(w) ) \\ \end{aligned}\]즉 여기서 Bound 가 얼마나 Tight 한지는 실제로
\[\begin{aligned} & KL(q_{\theta} (w) \parallel p(w \vert X,Y)) = \mathbb{E}_q [ log p(Y \vert X) ] - \mathbb{E}_q [ log (\frac{p(Y \vert X, w) p(w)}{q_{\theta}(w)}) ] \\ & = \text{Log Evidence} - \text {Lower Bound} \\ \end{aligned}\]가 되는 겁니다.
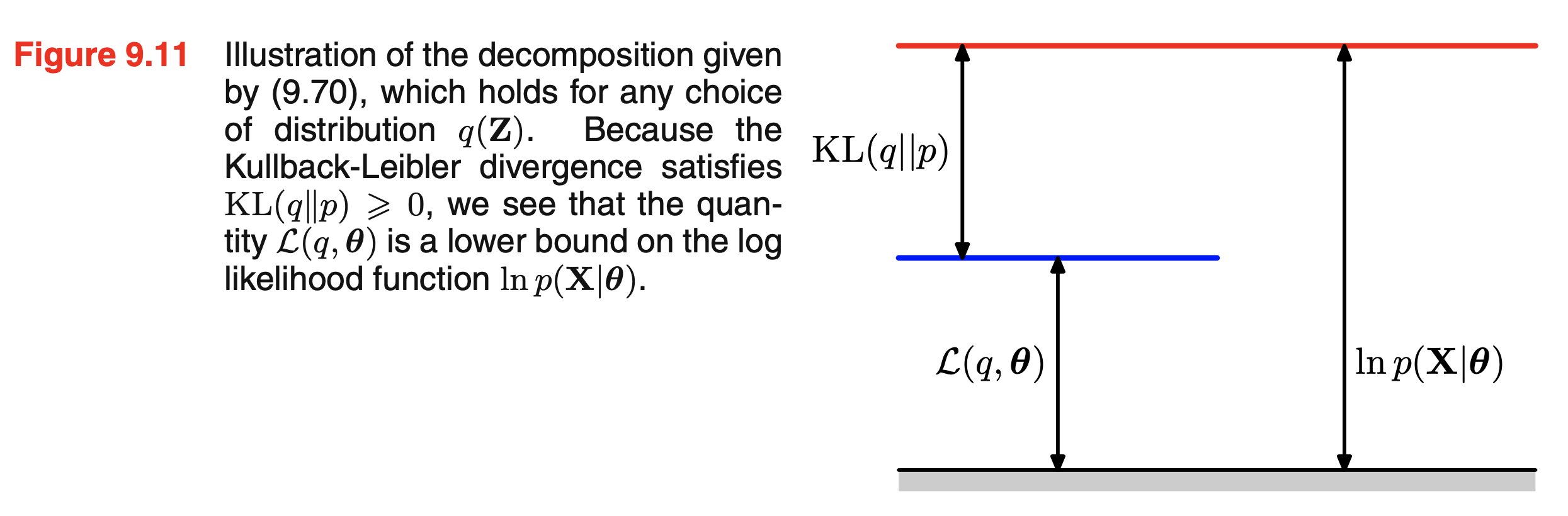 Fig. Log Evidence 의 한 점?인 Log Likelihood 를 ELBO 와 KLD 의 합으로 나타낸 그림. Bishop 책의 EM 알고리즘에 대한 그림이다.
Fig. Log Evidence 의 한 점?인 Log Likelihood 를 ELBO 와 KLD 의 합으로 나타낸 그림. Bishop 책의 EM 알고리즘에 대한 그림이다.
How to train NN using VI ?
마지막으로, 이제 어떻게 모델을 학습하면 될까요?
\[log p(Y \vert X) \geq \int q_{\theta}(w) p (Y \vert X, w) dw - KL (q_{\theta} (w) \parallel p(w) )\]Laplace Approximation
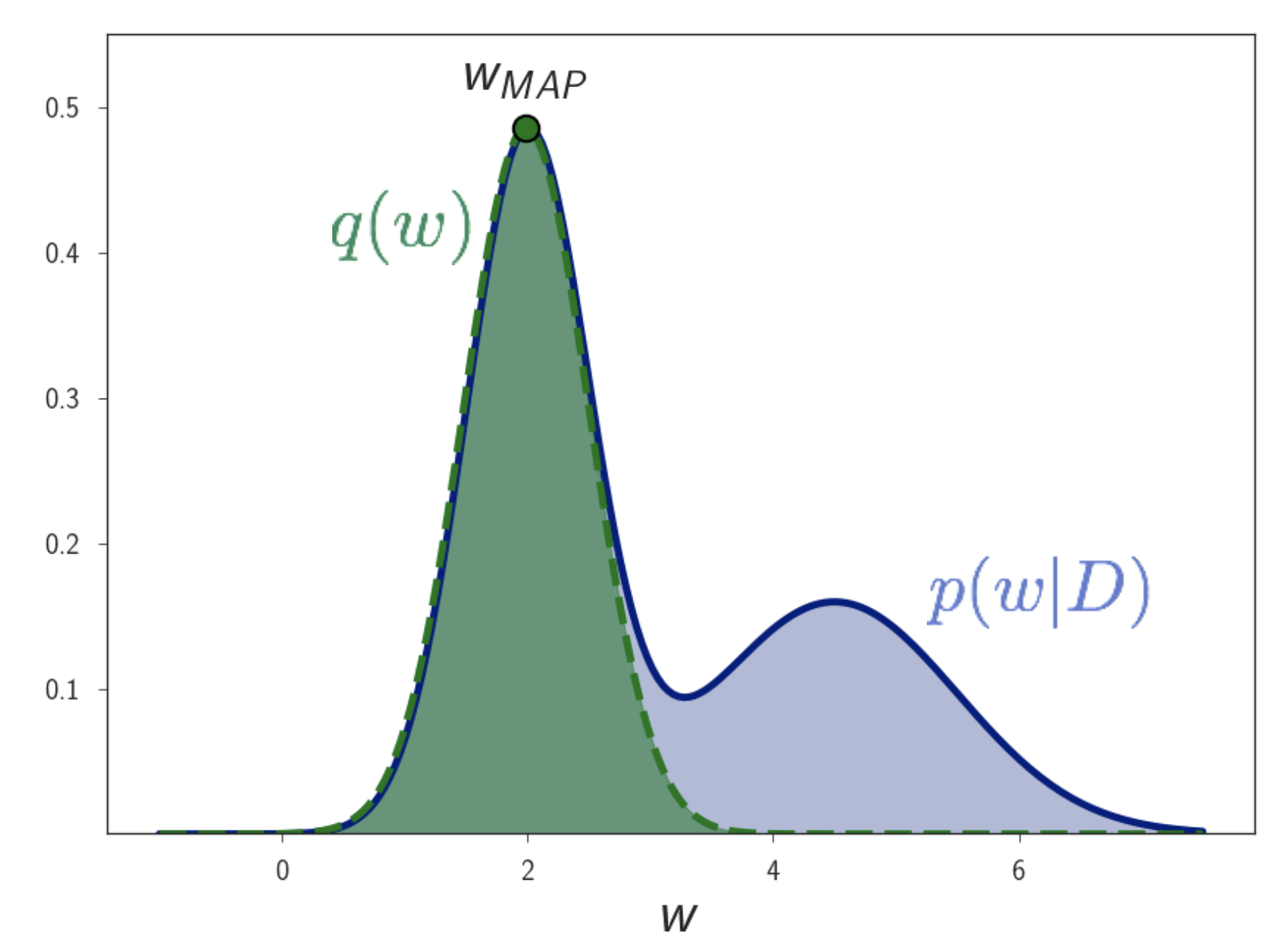 Fig.
Fig.
MARKOV CHAIN MONTE CARLO
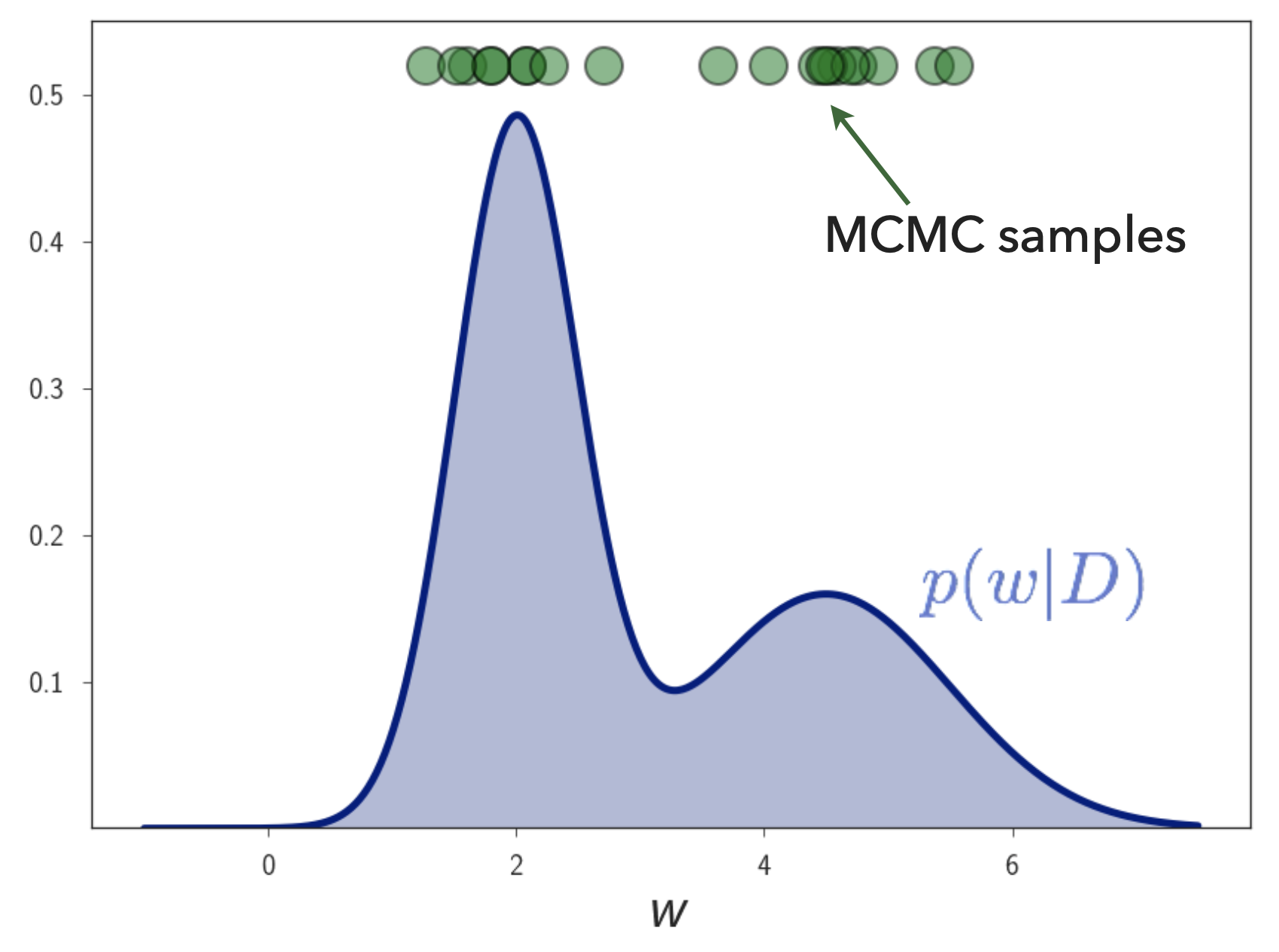 Fig.
Fig.
Dropout as a Bayesian Approximation
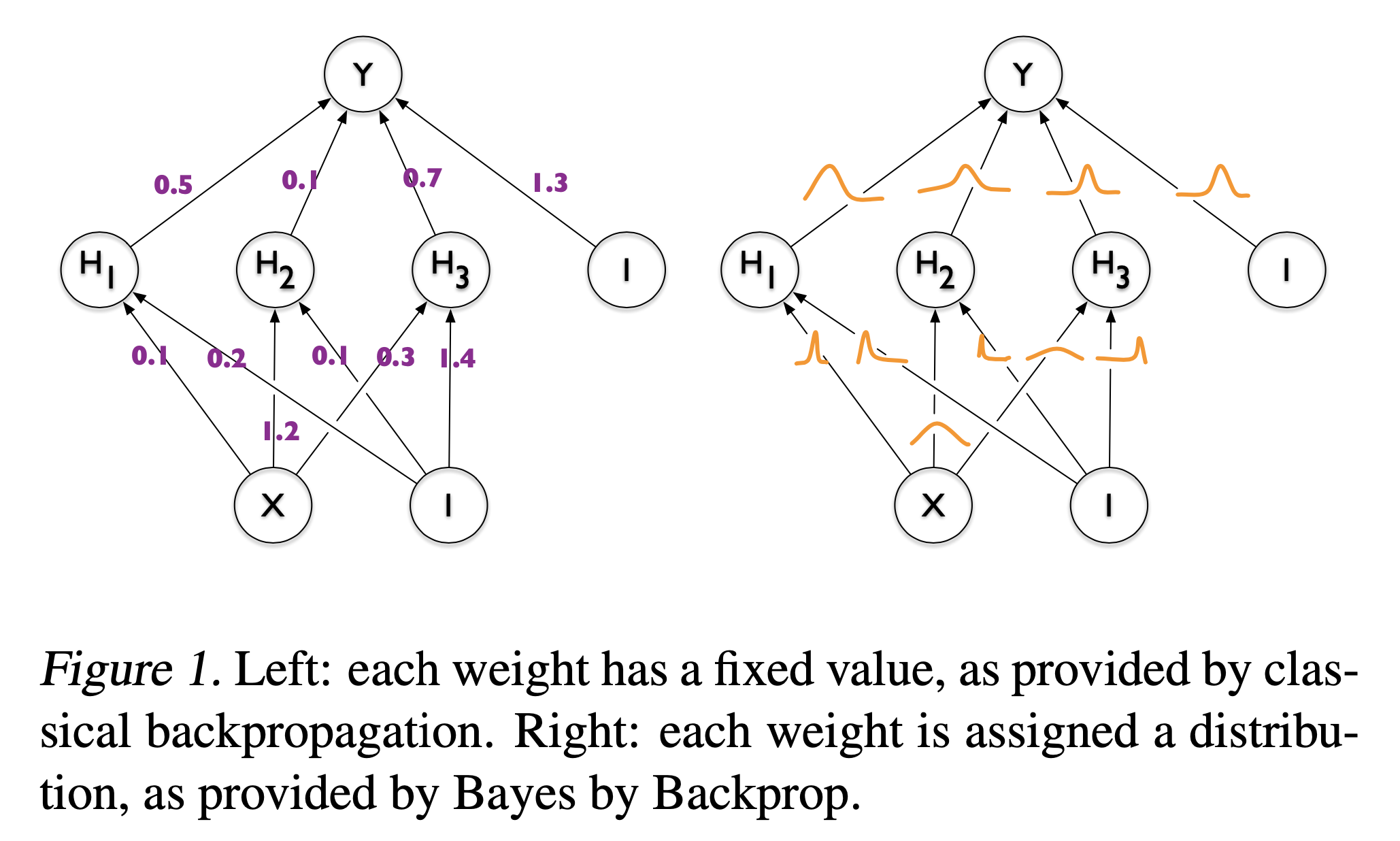 Fig.
Fig.
References
- Papers
- Lecture Slides and Tutorial Slides
- Blog Posts
- Yarin Gal’s Blog
- The evidence lower bound (ELBO) from Matthew N. Bernstein
- Variational autoencoders
- How I learned to stop worrying and write ELBO (and its gradients) in a billion ways from Yuge Shi
- Bayesian Neural Network (베이지안 뉴럴 네트워크) 내용 정리 from JINSOL KIM
- [Drug Discovery] #2 가상탐색을 위한 신뢰할 수 있는 인공지능