REINFORCE and Actor-Critic
15 Jan 2022이 글은 Pytorch의 공식 구현체를 통해서 실제 강화학습 알고리즘이 어떻게 구현되어있는지를 알아보는 것이 목적입니다. Reference code-base는 다음과 같습니다.
- pytorch/examples/reinforcement_learning/reinforce.py
- pytorch/examples/reinforcement_learning/actor_critic.py
< 목차 >
REINFORCE
REINFORCE를 통해 Agent의 Policy를 학습하기 위해서는 우선 아래의 5개의 element (term)를 정의해야 합니다.
- 1.Agent가 행동을 할 장소인 env 설정 (환경 설정)
- 2.
Policy: Neural Network 기반의 Policy 구현체 (클래스) - 3.
select_action: Policy와 현재 state를 기반으로 action을 sampling할 함수 - 4.
finish_episode: 에피소드가 한 번 끝날 때 마다 Policy를 업데이트 해주는 함수 - 5.위의 구현체드를 통해 loop를 돌리는 부분 (main)
Actor-Critic의 내용을 까먹으셨다면 제 블로그 내 Actor-Critic post를 참고하시면 좋을 것 같습니다.
Initialize Environment
우리가 REINFORCE로 학습하려는 task는 cartpole 입니다. 주어진 물체의 밸런스를 잘 잡아서 최대한 오랜 시간 유지하는게 목표죠. 이를 위해서 가장 먼저 해야하는 것은 환경을 세팅하는 겁니다.
왠만하면 OpenAI에서 제공해주는 open-source package인 gym을 사용하므로 먼저 install을 잘 해주고 위의 코드처럼 environment를 만들어주면 됩니다.
gamma:Rewards-to-go를 산정할 때 사용하는 discount factor \(\gamma\) 값seed: 랜덤시드 설정 (어려운 태스크에서는 이에 따라 수렴을 할수도 안할수도 있음)render: 강화학습이 진행되면서 어떻게 agent가 행동하는지 실시간 모니터링할지log-interval: log를 언제마다 찍을지 결정하는 값
같은 변수들을 선언해주고 Openai Gym의 CartPole-v1 환경을 만들어 줍니다.
env = gym.make('CartPole-v1')
env.seed(args.seed)
torch.manual_seed(args.seed)
그러면 랜더링할 경우 아래와 같은 cartpole을 볼 수 있습니다.
Cartpole 말고도 다양한 환경이 존재하지만, 복잡한 환경에서 Agent를 학습하기 전에 우선 state space와 action space가 상대적으로 작은 Cartpole을 통해 알고리즘의 구현체를 이해하는 것이 본 post의 목적입니다.
Policy
그 다음은 Policy 네트워크를 만드는겁니다. 우리는 Deep RL을 하고있으니 아래와 같은 Neural Network (NN)을 선언해주면 됩니다.
굉장히 간단한 NN인데 현재 CartPole 이라는 환경의 이미지, 즉 state는 4차원 이므로 첫 layer는 4차원 input을 128차원으로 mapping해주며 여기에 비선형성을 더해주는 ReLU와 Dropout 이 추가되었습니다.
그리고 마지막으로 Action Space로 mapping해주는 linear Layer가 있습니다.
Policy(
(affine1): Linear(in_features=4, out_features=128, bias=True)
(dropout): Dropout(p=0.6, inplace=False)
(affine2): Linear(in_features=128, out_features=2, bias=True) # 좌, 우 행동
)
다른 Supervised Learning (SL)과 달리 강화학습을 해야하기 때문에 log prob에 Advantage, A 값을 계산해서 곱해줘야 합니다.
이를 계산하기 위해 log prob, reward를 caching할 list 을 선언해줍니다.
self.saved_log_probs = []
self.rewards = []
Sampling Action
그 다음은 현재 state에서 어떤 행동을 할 지를 샘플링하는 부분입니다.
먼저 4차원의 state를 받아 policy network에 태워서 현재 state에서의 2지선다 (좌,우) 행동에 대한 확률을 얻습니다.
(Pdb) state
tensor([[ 0.0026, 0.0269, -0.0137, -0.0200]])
(Pdb) policy(state)
tensor([[0.4246, 0.5754]], grad_fn=<SoftmaxBackward>)
그리고 이를 Categorical 분포로 감싸주면 아래와 같이 되는데요 (현재는 액션이 2개뿐이니 Bernoulli Distribution 이라고 할 수 있음), 이렇게 해주는 이유는 우리가 RL을 할 때 각 state에 대해 action을 sampling 해줘야만 항상 확률이 max인 action이 아니라 확률이 낮은 action에 대해서도 평가하고 학습하는 데 쓸 수 있기 때문입니다 (exploration).
(Pdb) Categorical(probs)
Categorical(probs: torch.Size([1, 2]))
이제 이 분포로부터 샘플링을 하면 앞서 구한 [0.4246, 0.5754] 확률에 따라서 액션을 샘플링 합니다.
(Pdb) m.sample()
tensor([0])
(Pdb) m.sample()
tensor([1])
(Pdb) m.sample()
tensor([0])
(Pdb) m.sample()
tensor([1])
(Pdb) m.sample()
tensor([0])
(Pdb) m.sample()
tensor([0])
위에는 여러번 샘플링했을 때 결과가 어떻게 되는지 한번 보려고 찍어본 예시이고, 실제 python debugger로 각 라인을 찍어본 결과는 아래와 같습니다.
(Pdb) action
tensor([1])
(Pdb) m.log_prob(action)
tensor([-0.6252], grad_fn=<SqueezeBackward1>)
(Pdb) probs
tensor([[0.4246, 0.5754]], grad_fn=<SoftmaxBackward>)
(Pdb) torch.log(probs)
tensor([[-0.7661, -0.6252]], grad_fn=<LogBackward>)
최종적으로 해당 액션이 있으면, 그 액션이 나올 확률에 log를 취해서 이를 Policy 네트워크에 저장합니다. 나중에 log_prob * A 를 해준 뒤에 backprop을 하기 위해서 입니다.
Update Policy Network
이제 Policy를 업데이트해야 되는데요, 이부분이 어떻게 구성되어있느냐? 먼저 Loop를 끊임없이 돌면서 매 episode 마다 \((s_1,a_1,r_1,s_2,a_2,r_2,\cdots, s_T,a_T,r_T)\) 를 쭉 뽑아야 합니다.
이런 Trajectory를 뽑는 부분은 딱 아래의 부분으로 설명할 수 있는데요
action = select_action(state)
state, reward, done, _ = env.step(action)
\(s_t\)를 받아서 \(a_{t+1}\)을 sample하고 \(r_{t+1},s_{t+1}\)을 env로부터 얻는겁니다. 에피소드를 진행하면서 전체 에피소드에 대한 reward를 계속 누적시키면서 저장도 해주고요.
그리고 이를 무한정 반복할 수 없기 때문에 현재 환경, 즉 Cartpole에 지정되어있는 reward_threshold 를 기준으로 이를 넘으면 loop를 탈출하는데 이 기준은
running_reward가 정하며 이는 코드에 나와있습니다.
근데 for loop 중간에 finish_episode()라는 함수가 있죠. 이 부분이 바로 매 episode가 끝날 때 마다 Policy를 업데이트 하는 부분입니다.
함수는 아래와 같이 구현되어 있는데요,
보시면 환경과 상호작용하면서 action을 sample하면서 매 time-step, \(t\) 마다의 reward가 저장되어 있으며 이는 아래와 같습니다.
(Pdb) len(policy.rewards[::-1])
78
(Pdb) policy.rewards[::-1]
[1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0,
1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0,
1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0,
1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0,
1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0,
1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0]
중간에 환경이 78step에서 멈췄기 때문에 78개의 reward만이 저장되어 있고
아래의 코드에 따라서,
for r in policy.rewards[::-1]:
R = r + args.gamma * R
returns.insert(0, R)
(아래의 수식과 동치인데, post를 보신분들은 아시겠지만 이는 그 action이 얼마짜리인지를 평가하는 방법 중 가장 간단한 방법인 Monte Carlo Estimator 입니다. REINFORCE이므로 Critic은 아직 없습니다.)
\[R_t = \sum_{t=0}^T \gamma^t r_t\]해당 step마다 감가상각을 맞은 (discounted) reward를 재산정 하는 겁니다.
(Pdb) len(returns)
78
(Pdb) returns
[54.33902522560851, 53.87780325819041, 53.41192248302062, 52.94133584143497,
52.465995799429265, 51.98585434285784, 51.500862972583676, 51.01097269957947,
50.51613403997926, 50.016297010080066, 49.511411121292994, 49.00142537504343,
48.48628825761963, 47.96594773496932, 47.44035124744376, 46.90944570448865,
46.37317747928146, 45.831492403314606, 45.284335760923845, 44.73165228376146,
44.1733861452136, 43.60948095476121, 43.03987975228405, 42.46452500230712,
41.88335858818901, 41.29632180625153, 40.70335535985003, 40.10439935338387,
39.49939328624633, 38.888276046713464, 38.27098590577118, 37.647460510879974,
37.01763687967674, 36.38145139361287, 35.73883979152815, 35.08973716315975,
34.4340779425856, 33.77179590160162, 33.10282414303194, 32.42709509397166,
31.744540498961268, 31.05509141309219, 30.358678195042614, 29.655230500043047,
28.944677272770754, 28.22694674017248, 27.501966404214627, 26.76966303456023,
26.02996266117195, 25.282790566840355, 24.528071279636723, 23.76572856528962,
22.995685419484467, 22.21786406008532, 21.4321859192781, 20.638571635634445,
19.8369410460954, 19.027213177874142, 18.209306240276913, 17.383137616441328,
16.54862385499124, 15.705680661607312, 14.854222890512437, 13.994164535871148,
13.12541872310217, 12.247897700103202, 11.361512828387072, 10.466174574128356,
9.561792499119552, 8.64827525163591, 7.72553055720799, 6.793465209301,
5.8519850599, 4.90099501, 3.9403989999999998, 2.9701, 1.99, 1.0]
마지막에는 그냥 리턴이 1이고 (현재 에피소드는 10000step 중에서 78번째만에 성공을 한거죠) 이를 다시 normalize 해주면 아래와 같습니다.
(Pdb) returns # returns = (returns - returns.mean()) / (returns.std() + eps)
tensor([ 1.4914e+00, 1.4619e+00, 1.4321e+00, 1.4020e+00, 1.3716e+00,
1.3409e+00, 1.3098e+00, 1.2785e+00, 1.2468e+00, 1.2148e+00,
1.1825e+00, 1.1499e+00, 1.1169e+00, 1.0836e+00, 1.0500e+00,
1.0160e+00, 9.8171e-01, 9.4705e-01, 9.1204e-01, 8.7667e-01,
8.4095e-01, 8.0486e-01, 7.6842e-01, 7.3160e-01, 6.9441e-01,
6.5685e-01, 6.1890e-01, 5.8058e-01, 5.4187e-01, 5.0276e-01,
4.6326e-01, 4.2336e-01, 3.8306e-01, 3.4235e-01, 3.0123e-01,
2.5970e-01, 2.1774e-01, 1.7536e-01, 1.3256e-01, 8.9319e-02,
4.5643e-02, 1.5266e-03, -4.3036e-02, -8.8049e-02, -1.3352e-01,
-1.7944e-01, -2.2583e-01, -2.7269e-01, -3.2002e-01, -3.6783e-01,
-4.1613e-01, -4.6491e-01, -5.1418e-01, -5.6395e-01, -6.1423e-01,
-6.6501e-01, -7.1631e-01, -7.6812e-01, -8.2046e-01, -8.7332e-01,
-9.2672e-01, -9.8066e-01, -1.0351e+00, -1.0902e+00, -1.1458e+00,
-1.2019e+00, -1.2586e+00, -1.3159e+00, -1.3738e+00, -1.4323e+00,
-1.4913e+00, -1.5509e+00, -1.6112e+00, -1.6720e+00, -1.7335e+00,
-1.7956e+00, -1.8583e+00, -1.9217e+00])
이제 마지막으로 실제 REINFORCE의 수식처럼
\[\nabla_{\theta} J(\theta) \approx \sum_{i}\left(\sum_{t} \nabla_{\theta} \log \pi_{\theta}\left(\mathbf{a}_{t}^{i} \vert \mathbf{s}_{t}^{i}\right)\right)\left(\sum_{t} r\left(\mathbf{s}_{t}^{i}, \mathbf{a}_{t}^{i}\right)\right)\]아래의 코드를 통해 policy loss를 산정하면
for log_prob, R in zip(policy.saved_log_probs, returns):
policy_loss.append(-log_prob * R)
아래처럼 되고 이를 BackPropagation 하면 Policy가 업데이트 되는 것입니다.
(Pdb) policy_loss #torch.cat(policy_loss)
tensor([ 9.3239e-01, 1.2561e+00, 1.0801e+00, 9.0076e-01, 9.1203e-01,
1.0779e+00, 1.1815e+00, 1.0848e+00, 9.9581e-01, 9.0983e-01,
8.1994e-01, 1.0329e+00, 5.9475e-01, 8.0361e-01, 7.4601e-01,
5.4984e-01, 4.3901e-01, 8.2733e-01, 5.4570e-01, 5.6544e-01,
6.9274e-01, 6.7476e-01, 5.3832e-01, 7.2206e-01, 5.2357e-01,
2.8371e-01, 3.2219e-01, 1.6687e-01, 3.3372e-01, 3.7222e-01,
2.6276e-01, 2.3098e-01, 2.5936e-01, 2.3791e-01, 2.3465e-01,
1.7208e-01, 1.5607e-01, 1.4481e-01, 1.2690e-01, 7.3750e-02,
2.7267e-02, 1.1812e-03, -2.7377e-02, -7.4695e-02, -1.2630e-01,
-1.2419e-01, -1.5823e-01, -2.0956e-01, -1.9456e-01, -2.6148e-01,
-2.5040e-01, -3.6716e-01, -3.0935e-01, -3.6311e-01, -5.2213e-01,
-3.1056e-01, -3.7007e-01, -4.5262e-01, -5.0509e-01, -5.5682e-01,
-6.6902e-01, -5.3275e-01, -6.6688e-01, -6.5198e-01, -6.2906e-01,
-1.3167e+00, -1.0709e+00, -1.0465e+00, -8.2307e-01, -1.0744e+00,
-8.1389e-01, -6.9362e-01, -1.0453e+00, -8.1829e-01, -2.0383e+00,
-1.4645e+00, -1.2171e+00, -1.3923e+00], grad_fn=<CatBackward>)
(Pdb) policy_loss #torch.cat(policy_loss).sum()
tensor(0.6655, grad_fn=<SumBackward0>)
- Recap) REINFORCE
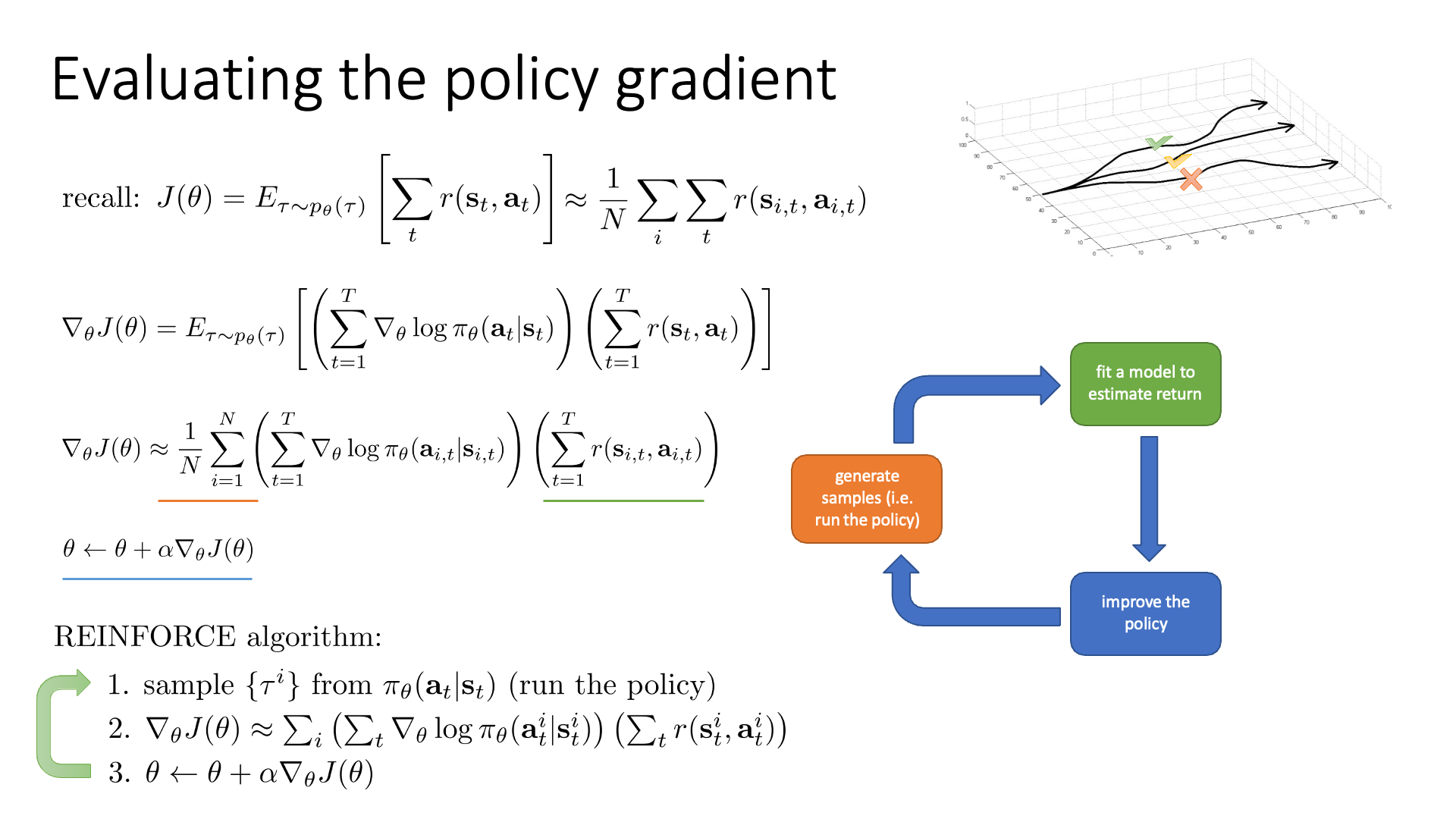 Fig. CS285의 REINFORCE 수식
Fig. CS285의 REINFORCE 수식
Iteration
마지막으로 Loop를 돌린 실제 결과를 처음부터 끝까지 보면 아래와 같습니다.
root@e5bcb446a9ee:/workspace/tutorial# python reinforce.py
Episode 10 Last reward: 26.00 Average reward: 16.00
Episode 20 Last reward: 16.00 Average reward: 14.85
Episode 30 Last reward: 49.00 Average reward: 20.77
Episode 40 Last reward: 45.00 Average reward: 27.37
Episode 50 Last reward: 44.00 Average reward: 30.80
Episode 60 Last reward: 111.00 Average reward: 42.69
Episode 70 Last reward: 131.00 Average reward: 70.39
Episode 80 Last reward: 87.00 Average reward: 76.68
Episode 90 Last reward: 100.00 Average reward: 96.49
Episode 100 Last reward: 115.00 Average reward: 115.31
Episode 110 Last reward: 333.00 Average reward: 150.83
Episode 120 Last reward: 500.00 Average reward: 248.35
Episode 130 Last reward: 500.00 Average reward: 338.73
Episode 140 Last reward: 291.00 Average reward: 345.93
Episode 150 Last reward: 112.00 Average reward: 256.34
Episode 160 Last reward: 117.00 Average reward: 198.14
Episode 170 Last reward: 278.00 Average reward: 227.55
Episode 180 Last reward: 336.00 Average reward: 250.06
Episode 190 Last reward: 195.00 Average reward: 237.52
Episode 200 Last reward: 227.00 Average reward: 228.20
Episode 210 Last reward: 500.00 Average reward: 279.83
Episode 220 Last reward: 395.00 Average reward: 340.28
Episode 230 Last reward: 500.00 Average reward: 395.89
Episode 240 Last reward: 500.00 Average reward: 437.66
Episode 250 Last reward: 500.00 Average reward: 458.68
Episode 260 Last reward: 500.00 Average reward: 463.04
Solved! Running reward is now 475.476968005226 and the last episode runs to 500 time steps!
+ Back Propagation with Sampling
앞서 구현체에서 pytorch의 Categorical Distribution method를 사용해 \(t\) 시점의 state, \(s_t\)에서 Action Space에 대한 확률 분포에 따라서 ㅁction을 샘플링 했던 게 기억 나실겁니다.
\[a_{t+1} \sim \pi (a_t \vert s_t)\]Policy가 뱉는 분포로 부터 argmax를 취한다면 가장 높은 확률을 가지는 행동을 deterministic하게 뽑아낼 수 있는데,
우리가 Categorical 객체를 이 만들어서 사용하는 이유는 매번 같은 행동이 나오지 않게 하기 위해서 입니다.
이는 강화학습에서 가장 중요하다고도 할 수 있는 두 가지 핵심 개념인
- expolitation : 가지고있는 policy를 기반으로 최적의 수를 두는 것
- exploration : 확률은 낮지만 가보지 않은 길을 개척해보는 것
두 가지를 적절히 하기 위해서 인거죠.
이 sampling 하는 부분은 RL뿐 아니라 generative modeling이나 representation learning을 할때도 자주 쓰이는 기법입니다. 그런데 이 sampling하는 행위는 미분이 불가능 (non-differentiable) 해서 backpropagation이 불가능해지는 문제가 있습니다. (Torch official docs의 distributions package 참고)
이를 해결할 수 있는 방법이 몇 가지가 있는데 아래와 같은 것들입니다.
- Score Function-based Gradient Estimator (Score Function estimator (such as REINFORCE) / likelihood ratio estimato)
- Path Derivative Gradient Estimator
그런데 여기서 보시면 1번이 REINFORCE인 것을 볼 수 있습니다.
probs = policy_network(state)
# Note that this is equivalent to what used to be called multinomial
m = Categorical(probs)
action = m.sample()
next_state, reward = env.step(action)
loss = -m.log_prob(action) * reward
loss.backward()
원래는 sampling 을 함으로써 미분이 불가능한데,
그 action의 시행확률이 몇인지를 sampling전에 log를 씌워 log_prob에 저장하고 reward를 곱함으로써 미분 불가능함을 우회한 것이죠.
또 다른 방법은 resample()이라는 함수를 통해서 reparameterization trick 을 사용해서 sampling하는 효과를 내면서도 미분 가능성을 잃지 않게 하는 거죠.
이를 앞서 말한 것 처럼 Pathwise Derivative 라고 합니다.
params = policy_network(state)
m = Normal(*params)
# Any distribution with .has_rsample == True could work based on the application
action = m.rsample()
next_state, reward = env.step(action) # Assuming that reward is differentiable
loss = -reward
loss.backward()
위 두 방식은 아래 처럼 차이가 조금 있는데,
# REINFORCE
loss = -m.log_prob(action) * reward
loss.backward()
# reparameterization trick
loss = -reward
loss.backward()
Categorical Reparameterization with Gumbel-Softmax 논문을 보시면 이 방법론들에 대해서 자세히 잘 설명해주고 있습니다 (Categorical 분포에 대해서 어떻게 Reparameterization Trick을 사용하는지에 대해서).
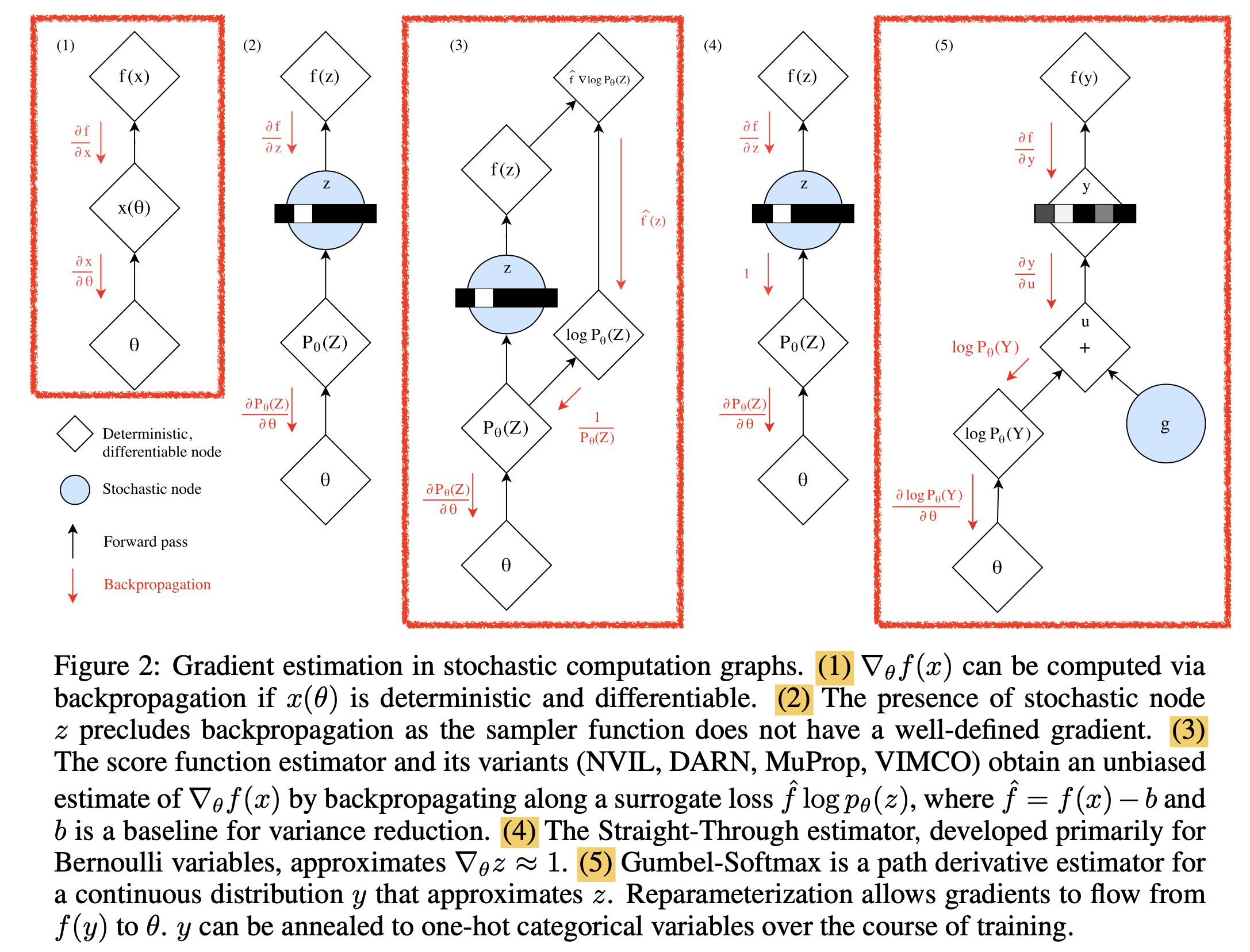 Fig 미분 불가능한 샘플링 기법이 적용된 알고리즘에서 미분을 가능하게 하는 5가지 방식들.
Fig 미분 불가능한 샘플링 기법이 적용된 알고리즘에서 미분을 가능하게 하는 5가지 방식들.
- 1번은 그냥 함수의 출력값부터 network parameter \(\theta\) 까지 graident가 잘 흐르는 모습이고, 2번부터는 미분 불가능한 (Non-Differentiable) Node 가 포함되어 있습니다.
- 아무런 장치가 없는 2번은 그래디언트가 제대로 흐르지 못하고,
- 3번이 바로 REINFORCE 방법이라 생각할 수 있습니다.
- 4번 방법은 샘플링이 들어갔으나 이것의 미분체를 그냥 1로 처리하는것에 그쳤고,
- 5번 방법이 z를 근사한 연속 분포 y를 위한
Path Derivative Estimator, 즉Gumbel-Softmax앞서 말한Reparameterization 과 같은 것이며 본 논문에서 제안한 방법론 입니다. g에는 그래디언트가 흐르지 않지만 출력값부터 \(\theta\)까지는 문제없이 그래디언트가 흐르는 걸 알 수 있죠.
이 중에서 Gumbel-Softmax가 또 유명한데, 이는 다른 post에서 다루도록 하고,
우리가 가져갈 수 있는 것은 미분 불가능한 연산에 대해서 REINFORCE가 쓰인다이며 다른 방식으로도 이런 문제를 해결할 수 있다는 겁니다.
Actor-Critic
이번에는 REINFORCE 의 업그레이드 버전인 Actor-Critic에 대해서 알아보도록 하겠습니다. Actor는 Policy Network로 state가 주어졌을 때 action space에 대한 확률 분포를 리턴하는것이며, Critic은 그 action이 얼마나 좋았는지를 평가해줍니다. 아래의 REINFORCE 수식에서
\[\nabla_{\theta} J(\theta) \approx \sum_{i}\left(\sum_{t} \nabla_{\theta} \log \pi_{\theta}\left(\mathbf{a}_{t}^{i} \vert \mathbf{s}_{t}^{i}\right)\right)\left(\sum_{t} r\left(\mathbf{s}_{t}^{i}, \mathbf{a}_{t}^{i}\right)\right)\]Log prob에 곱해지는 rewards-to-go를 monte carlo estimator가 아닌 Advantage Function 값으로 바꿔 줍니다.
그리고 이 \(A_{t}^i\)값을 bootstrapped estimator를 쓰면 \(r_{s_{t}^i,a_{t}^i} + V(s_{t+1}^i) - V(s_{t}^i)\) 가 됩니다.
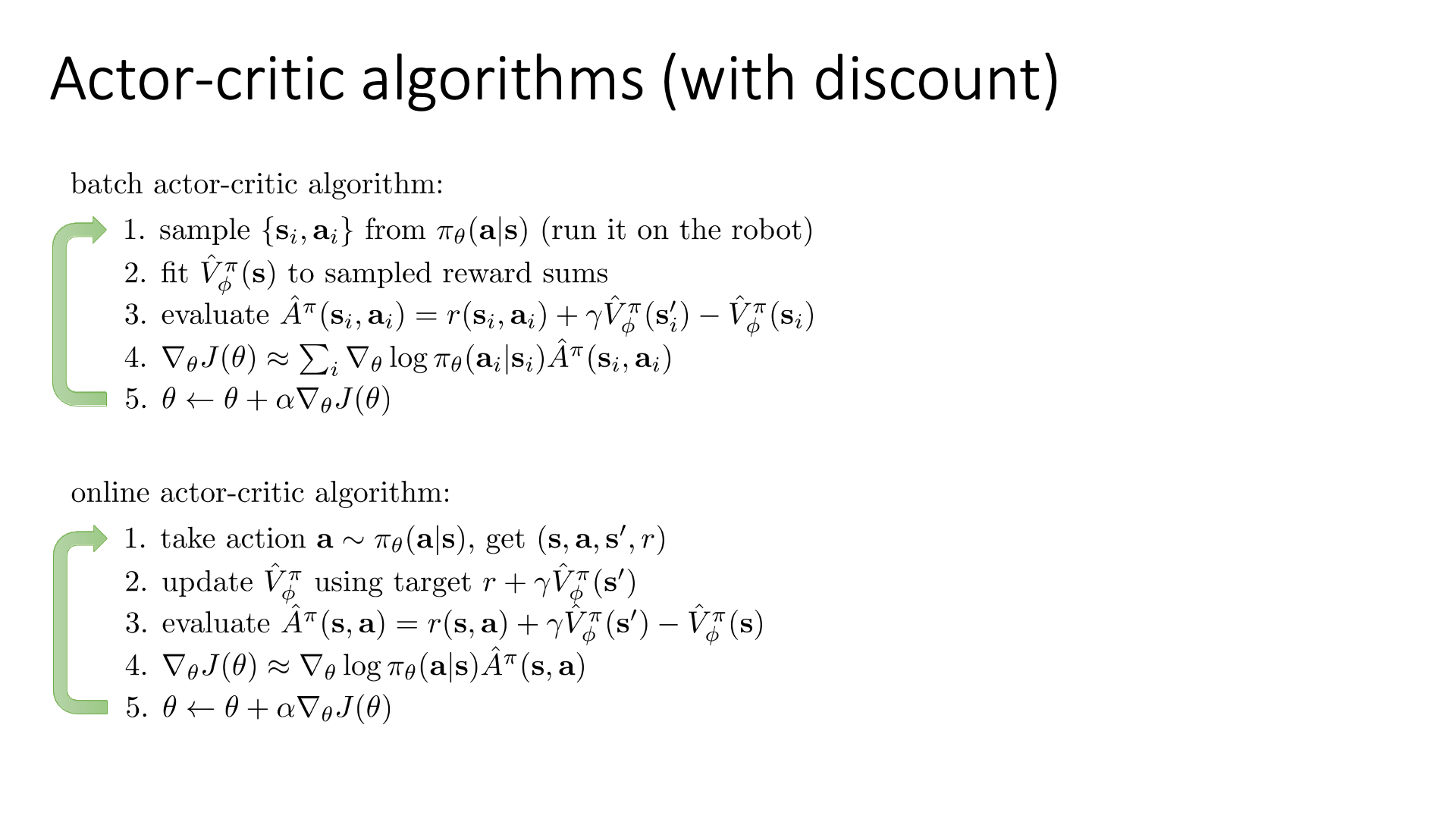 Fig. CS285의 Actor-Critic 알고리즘 설명
Fig. CS285의 Actor-Critic 알고리즘 설명
수식을 간단히해서 한 trajectory 만 sample 했다면 아래와 같은 수식을 구현해주면 되며, 여기서 \(V\) network가 바로 Critic 이며, 우리는 앞으로 Policy를 나타낼 파라메터 \(\pi\)와 state의 Value를 나타낼 파라메터 \(\phi\)를 둘 다 학습하면 됩니다. (REINFORCE는 Policy만 학습하면 됐음.)
\[\hat{A}^{\pi}\left(\mathbf{s}_{i}, \mathbf{a}_{i}\right)=r\left(\mathbf{s}_{i}, \mathbf{a}_{i}\right)+\hat{V}_{\phi}^{\pi}\left(\mathbf{s}_{i}^{\prime}\right)-\hat{V}_{\phi}^{\pi}\left(\mathbf{s}_{i}\right)\] \[\nabla_{\theta} J(\theta) \approx \sum_{i} \nabla_{\theta} \log \pi_{\theta}\left(\mathbf{a}_{i} \mid \mathbf{s}_{i}\right) \hat{A}^{\pi}\left(\mathbf{s}_{i}, \mathbf{a}_{i}\right)\]Initialize Environment
맨 처음 환경 설정은 크게 다를것이 없으니 넘어가도록 하겠습니다.
Policy
Policy 의 Neural Network 구현체도 크게 다를 것이 없어 보이지만,
보시면 head가 두개 있습니다.
# actor's layer
self.action_head = nn.Linear(128, 2)
# critic's layer
self.value_head = nn.Linear(128, 1)
즉 Actor, Critic을 아예 독립된 네트워크로 두지 않고 shared network 구조를 쓰겠다는 겁니다.
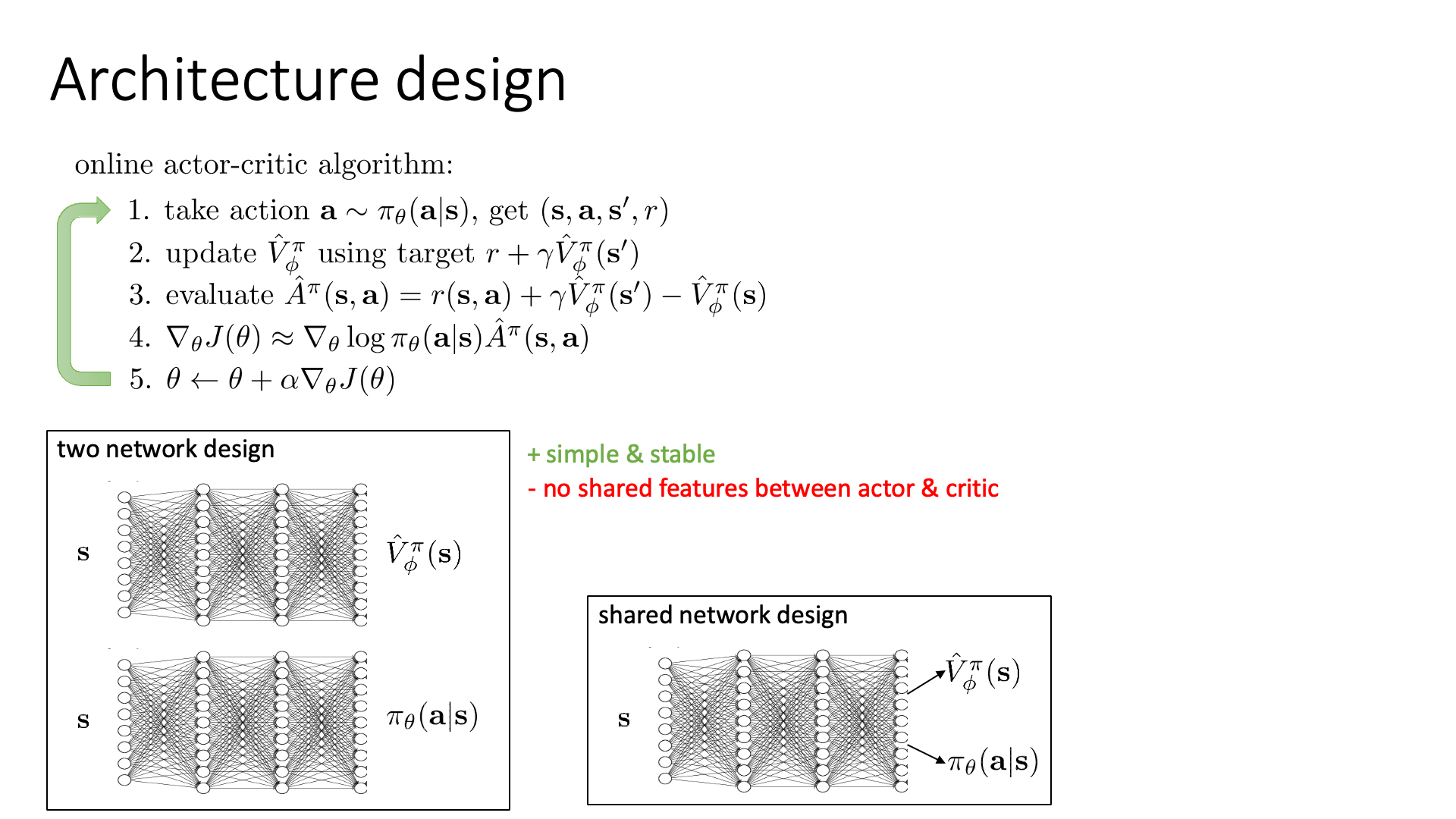 Fig. Network Body를 공유하는 경우 (twin-head)
Fig. Network Body를 공유하는 경우 (twin-head)
위의 그림에서 보시는 바와 같이, Actor와 Critic을 선언하는데 있어 완전히 독립적인 네트워크를 두 개 선언하는 방식이 있고, body는 공유하되 head만 두개로 빼는 방법이 있는데 여기서는 후자인 셈인 거죠. (각각의 장단점에 대해서는 문헌을 더 찾아보시길 바랍니다.)
Model class가 return하는 것을 보시면 action에 대한 prob 이외에도, value 값도 뱉는 것을 알 수 있습니다. 이 때 value는 당연히 1차원, 즉 Scalar 값입니다.
Sampling Action
select_action함수도 REINFORCE와 다를게 없는데요,
마찬가지로 Categorical Class로 Policy가 뱉은 \(\pi(a \vert s)\) Action Prob을 감싸주고, 이 분포로부터 샘플링을해준 action 과 현재 state가 얼마나 좋은지를 평가하는 value값을 각각 의 bucket에 저장합니다.
Update Policy and Value Network
이제 이 각각의 네트워크를 업데이트 하는 부분인데요,
REINFORCE와 비교해서 좀 살펴보도록 하겠습니다.
각 time-step, \(t\) 별로의 returns은 마찬가지로 discount를 해서 역순으로 계산합니다.
R = 0
returns = []
for r in model.rewards[::-1]:
# calculate the discounted value
R = r + args.gamma * R
returns.insert(0, R)
returns = torch.tensor(returns)
returns = (returns - returns.mean()) / (returns.std() + eps)
이제 여기서 REINFORCE와 차이가 생기는데, 우리가 gradient를 계산하기 위해 구하는 quantity는 log_prob과 Advantage, A를 곱해야 얻을 수 있습니다.
saved_actions = model.saved_actions
policy_losses = [] # list to save actor (policy) loss
value_losses = [] # list to save critic (value) loss
for (log_prob, value), R in zip(saved_actions, returns):
advantage = R - value.item()
# calculate actor (policy) loss
policy_losses.append(-log_prob * advantage)
# calculate critic (value) loss using L1 smooth loss
value_losses.append(F.smooth_l1_loss(value, torch.tensor([R])))
# sum up all the values of policy_losses and value_losses
loss = torch.stack(policy_losses).sum() + torch.stack(value_losses).sum()
# perform backprop
loss.backward()
Total Loss는 Value Loss와 Policy Loss를 더한 값인데, Policy Loss를 계산하는 방법은 log_prob에 Advantage라는 값이 곱해지는데, 이는 다음과 같습니다.
\[r(s_t,a_t) + \gamma \sum_{t'=t+1}^T r(s_{t'},a_{t'}) - V (s_t)\]Value network의 output을 사용해서 계산이 되긴 하지만, 정확히 bootstrapped estimator가 아닙니다. 그리고 Value Loss를 계산할 때 Value Network의 target도
\[r(s_t,a_t) + \gamma \sum_{t'=t+1}^T r(s_{t'},a_{t'})\]임을 알 수 있습니다.
그리고 계산한 returns에 대해서 (각 timestep별 r + sum of discounted future rewards) 평균을 빼주는 걸 알 수 있습니다.
원래라면 Advantage Function이 아래와 같고
\[\hat{A}^{\pi}\left(\mathbf{s}_{i}, \mathbf{a}_{i}\right)=r\left(\mathbf{s}_{i}, \mathbf{a}_{i}\right)+\hat{V}_{\phi}^{\pi}\left(\mathbf{s}_{i}^{\prime}\right)-\hat{V}_{\phi}^{\pi}\left(\mathbf{s}_{i}\right)\]실제로는 현재 Value Network가 예측한 값인 \(\hat{V}_{\phi}^{\pi}\left(\mathbf{s}_{i}\right)\) 가 \(r\left(\mathbf{s}_{i}, \mathbf{a}_{i}\right)+\hat{V}_{\phi}^{\pi}\left(\mathbf{s}_{i}^{\prime}\right)\) 를 따라가도록 학습되어야 합니다.
사실 뭐가 맞다 틀리다 할 순 없는것이, bootstrapped target을 사용하면 (ideal target을 씀) variance가 더 낮아지지만 bias가 생길 수 있고, 지금의 구현 예제대로 하면 variance는 조금 크지만 우리가 구한 gradient는 unbias 합니다.
bootstrapped target을 구하고싶다면 아래처럼 loop을 구성해도 되겠습니다.
log_probs = [ log_prob for log_prob, value in saved_actions ]
values = [ value for log_prob, value in saved_actions ]
rewards = model.rewards
for timestep, (log_prob, r) in enumerate(zip(log_probs, rewards)):
value = values[timestep]
next_value = values[timestep+1] if timestep < len(log_probs) - 1 else torch.tensor([0.0])
value_target = torch.tensor([r]) + gamma * next_value.item() # r + V(s_{t-1})
advantage = value_target - value # r + V(s_{t-1}) + V(s_{t})
policy_losses.append(-log_prob * advantage.detach().item()) # - log_prob * ( r + V(s_{t-1}) + V(s_{t}) )
value_losses.append(F.smooth_l1_loss(value, value_target.detach())) # || V(s_{t}) - r + V(s_{t-1}) ||^2
optimizer.zero_grad()
actor_loss = torch.stack(policy_losses).sum()
critic_loss = torch.stack(value_losses).sum()
loss = (actor_loss + critic_loss)
loss.backward()
optimizer.step()
Iteration
마지막으로는 Loop를 돌려 Trajectory를 계속 샘플링해가면서 Policy, Value Network를 업데이트 하면 됩니다.
아래는 monte carlo estimator를 활용한 Actor-Critic이고
root@e5bcb446a9ee:/workspace/tutorial# python actor_critic.py
Episode 10 Last reward: 9.00 Average reward: 10.67
Episode 20 Last reward: 10.00 Average reward: 14.35
Episode 30 Last reward: 11.00 Average reward: 12.54
Episode 40 Last reward: 10.00 Average reward: 11.31
Episode 50 Last reward: 12.00 Average reward: 10.79
Episode 60 Last reward: 9.00 Average reward: 10.43
Episode 70 Last reward: 9.00 Average reward: 10.51
Episode 80 Last reward: 12.00 Average reward: 11.04
Episode 90 Last reward: 10.00 Average reward: 10.78
Episode 100 Last reward: 32.00 Average reward: 12.34
Episode 110 Last reward: 12.00 Average reward: 13.97
Episode 120 Last reward: 26.00 Average reward: 19.78
Episode 130 Last reward: 38.00 Average reward: 28.38
Episode 140 Last reward: 65.00 Average reward: 48.45
Episode 150 Last reward: 75.00 Average reward: 70.96
Episode 160 Last reward: 108.00 Average reward: 71.93
Episode 170 Last reward: 100.00 Average reward: 83.27
Episode 180 Last reward: 12.00 Average reward: 78.75
Episode 190 Last reward: 19.00 Average reward: 74.03
Episode 200 Last reward: 35.00 Average reward: 53.71
Episode 210 Last reward: 53.00 Average reward: 54.67
Episode 220 Last reward: 51.00 Average reward: 57.19
Episode 230 Last reward: 64.00 Average reward: 60.95
Episode 240 Last reward: 109.00 Average reward: 88.45
Episode 250 Last reward: 200.00 Average reward: 106.18
Episode 260 Last reward: 117.00 Average reward: 109.89
Episode 270 Last reward: 77.00 Average reward: 108.43
Episode 280 Last reward: 137.00 Average reward: 112.53
Episode 290 Last reward: 197.00 Average reward: 129.27
Episode 300 Last reward: 171.00 Average reward: 152.55
Episode 310 Last reward: 179.00 Average reward: 156.38
Episode 320 Last reward: 200.00 Average reward: 173.89
Episode 330 Last reward: 98.00 Average reward: 179.26
Episode 340 Last reward: 60.00 Average reward: 149.99
Episode 350 Last reward: 152.00 Average reward: 131.80
Episode 360 Last reward: 200.00 Average reward: 142.50
Episode 370 Last reward: 200.00 Average reward: 165.57
Episode 380 Last reward: 200.00 Average reward: 179.39
Episode 390 Last reward: 200.00 Average reward: 187.66
Episode 400 Last reward: 200.00 Average reward: 166.43
Episode 410 Last reward: 200.00 Average reward: 171.87
Episode 420 Last reward: 200.00 Average reward: 183.16
Episode 430 Last reward: 200.00 Average reward: 189.92
Episode 440 Last reward: 200.00 Average reward: 193.96
Episode 450 Last reward: 200.00 Average reward: 189.47
Episode 460 Last reward: 200.00 Average reward: 193.70
Episode 470 Last reward: 200.00 Average reward: 187.99
Episode 480 Last reward: 200.00 Average reward: 192.81
Solved! Running reward is now 195.2293344612271 and the last episode runs to 200 time steps!
아래는 bootstrapped estimator를 쓴 경우입니다.
Episode 10 Last reward: 9.00 Average reward: 10.89
Episode 20 Last reward: 15.00 Average reward: 11.33
Episode 30 Last reward: 23.00 Average reward: 15.46
Episode 40 Last reward: 13.00 Average reward: 19.20
Episode 50 Last reward: 76.00 Average reward: 29.51
Episode 60 Last reward: 133.00 Average reward: 51.61
Episode 70 Last reward: 29.00 Average reward: 67.07
Episode 80 Last reward: 200.00 Average reward: 93.90
Episode 90 Last reward: 200.00 Average reward: 136.47
Episode 100 Last reward: 200.00 Average reward: 161.97
Episode 110 Last reward: 79.00 Average reward: 164.56
Episode 120 Last reward: 95.00 Average reward: 168.45
Episode 130 Last reward: 141.00 Average reward: 146.15
Episode 140 Last reward: 200.00 Average reward: 158.77
Episode 150 Last reward: 181.00 Average reward: 165.11
Episode 160 Last reward: 80.00 Average reward: 139.79
Episode 170 Last reward: 200.00 Average reward: 129.22
Episode 180 Last reward: 200.00 Average reward: 146.80
Episode 190 Last reward: 200.00 Average reward: 168.15
Episode 200 Last reward: 200.00 Average reward: 180.93
Episode 210 Last reward: 200.00 Average reward: 188.58
Episode 220 Last reward: 200.00 Average reward: 190.74
Episode 230 Last reward: 200.00 Average reward: 194.46
Solved! Running reward is now 195.24610193969923 and the last episode runs to 200 time steps!
여기까지 REINFORCE부터 Actor-Critic까지 Policy-based method의 가장 기본적인 algorithm들의 구현체를 살펴봤습니다.